El robot original DARwIn-OP usa un computador Intel Atom Z530 de 1.6 GHz y un controlador ARM CM-730. Este controlador incluye un giroscopio de 3 ejes, un acelerómetro de 3 ejes y un bus Dynamixel para conectar los servos del robot.
Por mi parte, pretendo usar una electrónica alternativa basada en un computador ARM más poderoso (y barato). Para el computador principal, mi candidato es el ODROID-XU que es un quad Cortex-A15 1.6GHz con 2GB de RAM.
En vez del controlador, usaré un USB2AX para conectar los servos Dynamixel y varios componentes I2C para el giroscopio y acelerómetro.
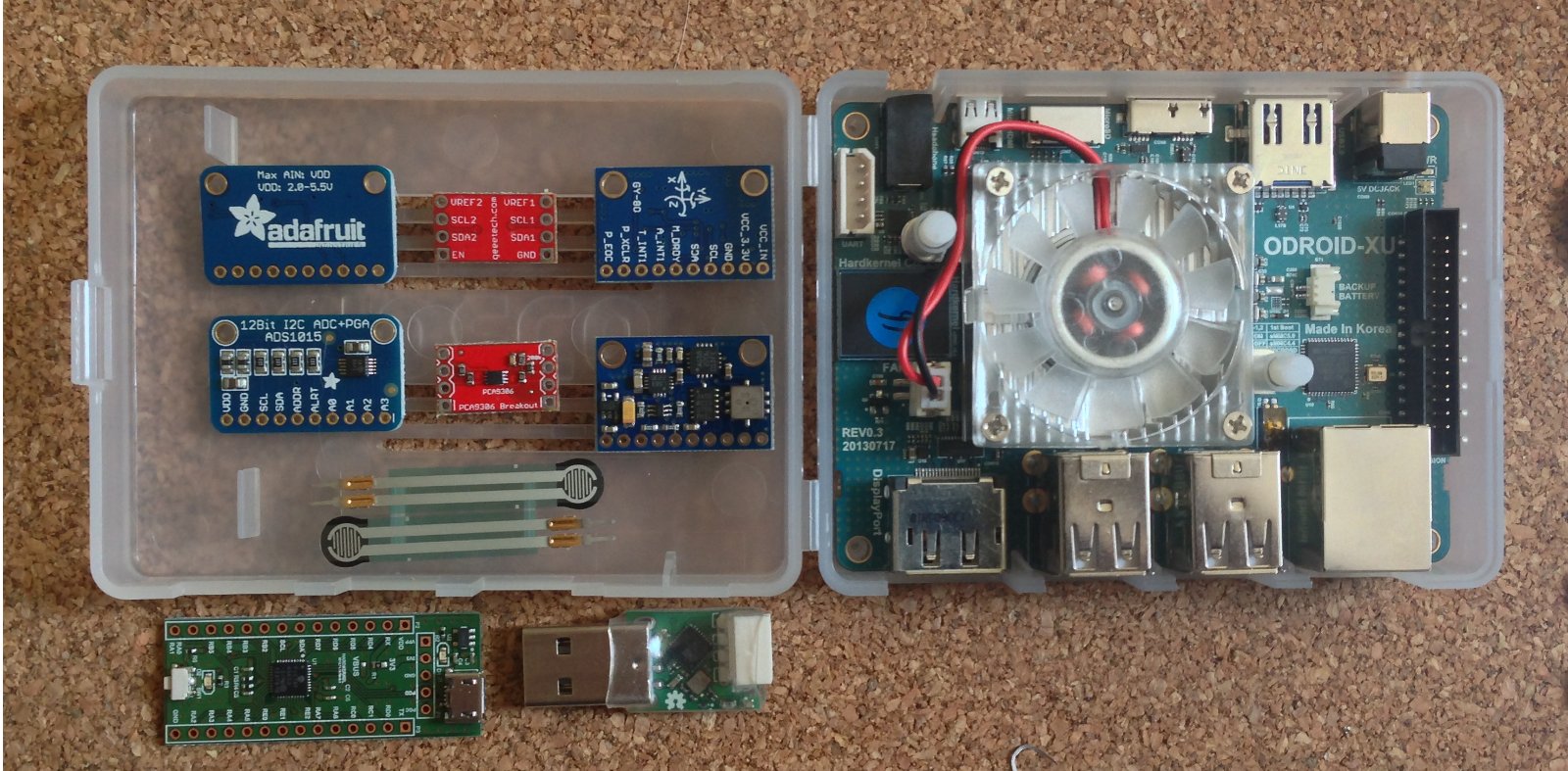
En la imagen se muestran los componentes que ya tengo que estaré probando:
- Conversor ADC I2C de 12 bit y 4 canales (chip ADS1015)
- Traductor de voltaje I2C (chip PCA9306)
- un multi componente I2C 10DOF con sensores de giroscopio de 3 ejes, acelerómetro de 3 ejes, compás de 3 ejes, temperaura y presión (chips, L3G4200D, ADXL345, HMC5883L, BMP085)
- Resistencia sensora de fuerza (.1N to 100N)
- USB IO Board para ODROID con interfaces de GPIO/PWM/SPI/UART/I2C/ADC
- Interfaz Dynamixel USB2AX
Usaré el bus I2C nativo I2C_0 que se encuentra en el conector LCD (CON15) en la parte inferior del ODROID-XU (el esquemático está disponible en Hardkernel vía petición por email).
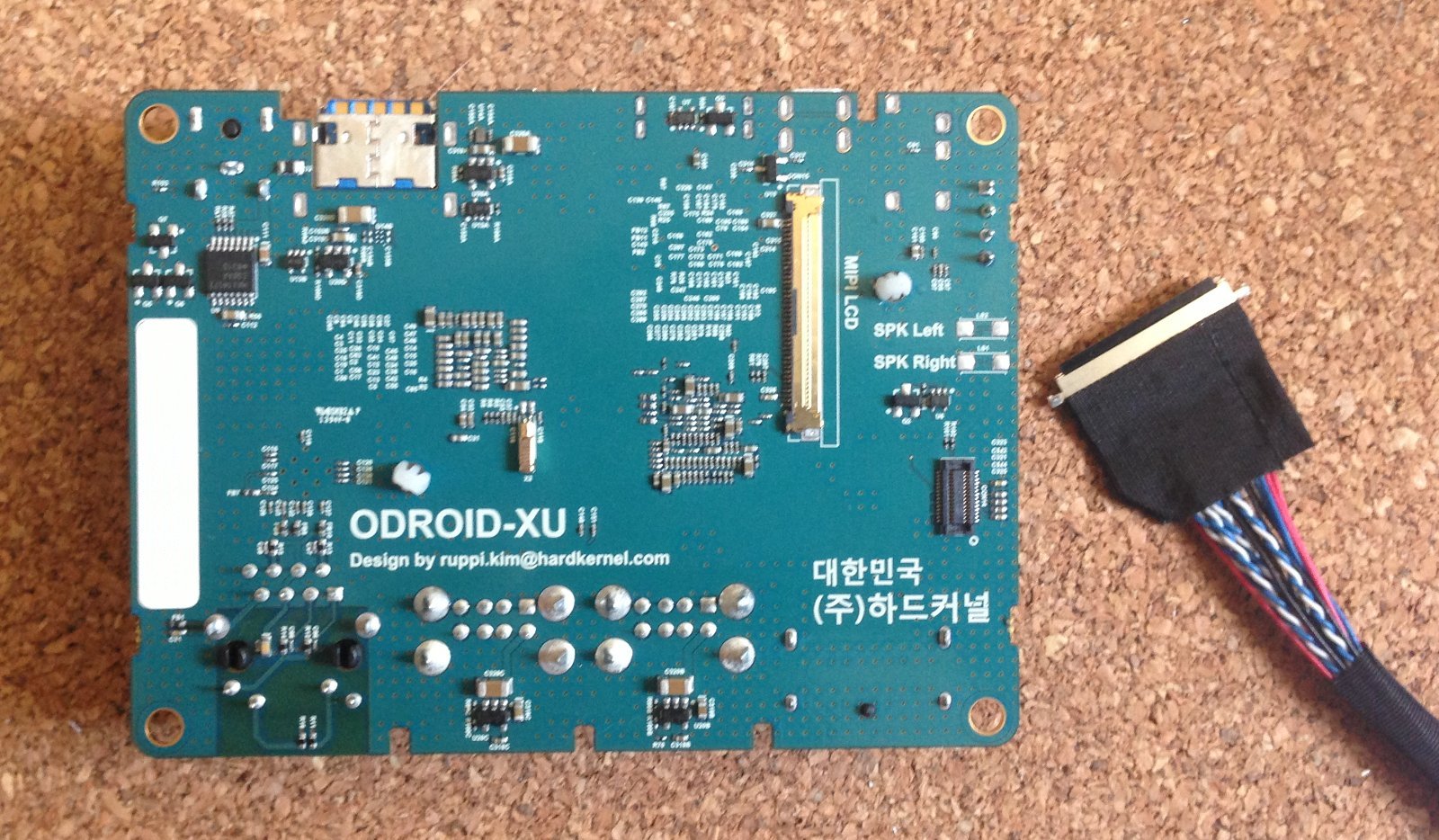
El conector LCD es un IPEX de 40 pines de 0.5mm. Compré un par de cables en Ebay, aunque ahora noté que Hardkernel (el fabricante de ODROID) lo ofrece a la venta también. La configuración de pines que usaré para la interfaz I2C es:
- 4 – 1.8V
- 6 – SCL
- 7 – SDA
- 10 – GND
La interfaz I2C del ODROID-XU es de 1.8V, por lo que el PCA9306 servirá para interconectar el resto de los componentes I2C que son de mayor voltaje.
El DARwIn-OP requiere un giroscopio y acelerómetro, pero me interesa usar el compás y los sensores de fuerza (vía los conversores AD) para una futura versión de los pies del DARwIn-OP.