Estuve un tiempo revisando cuál plataforma robótica podía comprar o armar para meter las manos en la masa un poco. Enpecé mirando los modelos y kits en el rango de los cientos de USD, algo que pudiera servir como base de desarrollo, seguí mirando los de rango de miles de USD. Pero la falta de capacidad de procesamiento me hizo continuar mirando en rangos ya bastante inalcanzables. Total en mirar no hay engaño.
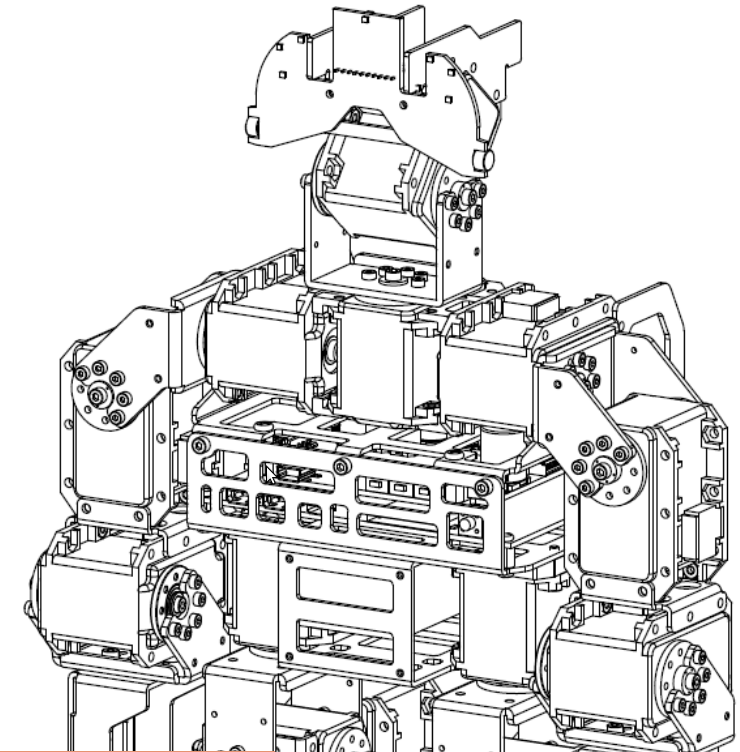
Así me tropecé con la plataformaDARwIn-OP que fue desarrollada por el fabricante Robotis en colaboración con las universidades norteamericanas de Virginia Tech, la Universidad de Purdue y la Universidad de Pennsylvania.


Es una plataforma humanoide open source con un PC a bordo corriendo Linux (Ubuntu) con suficiente capacidad, red e incluso una cámara web para procesamiento de ímagenes en línea. El robot no es nada barato con un valor de 12.000 USD. Pero por open source se refiere a que:
- Las especificaciones y diseños son open source y publicados en sourceforge.
- Los Manuales de Fabricación y Ensamblaje también están publicados online.
- El Software de Control es open source y también está publicado, incluso las ISOs con Ubuntu y el software preinstalado.
Así que el DARwIn-OP puede ser clonado. De todas formas hay que comprar servos (20 mínimo) y la electrónica, pero fue diseñado para ser clonado.
El robot ya tiene un tiempo, la Universidad de Pennsylvania ganó los últimos 3 años de la liga kid-size de la RoboCup con un equipo de DARwIn-OPs. Se utiliza en bastantes universidades y también se está clonando con impresión 3D a mitad de costo, se puede ver en el blog de Michael Overstreet. Hay simuladores disponibles, está programado en C++ y hay algunos upgrades como pies con sensores de presión y pinzas para las manos.
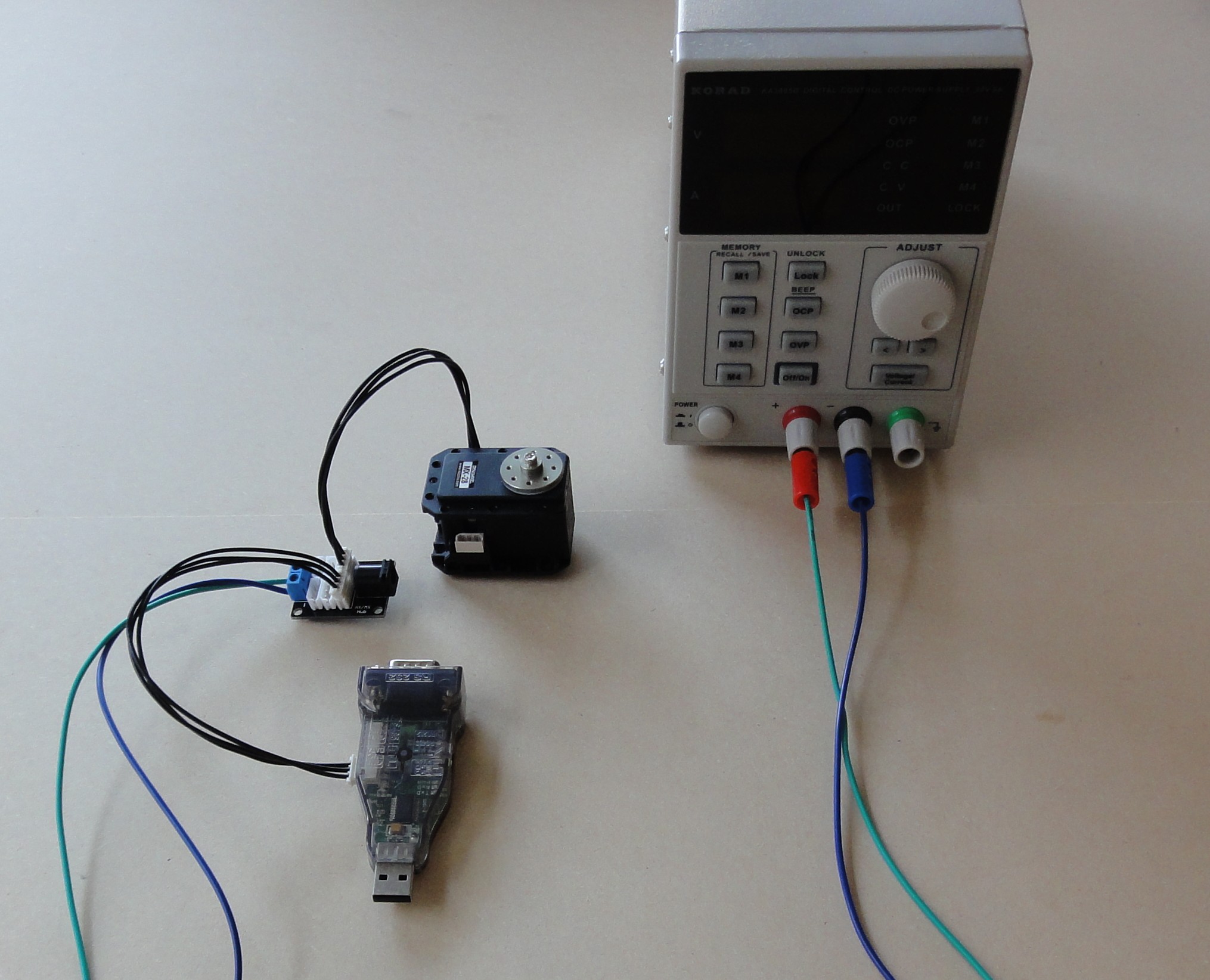
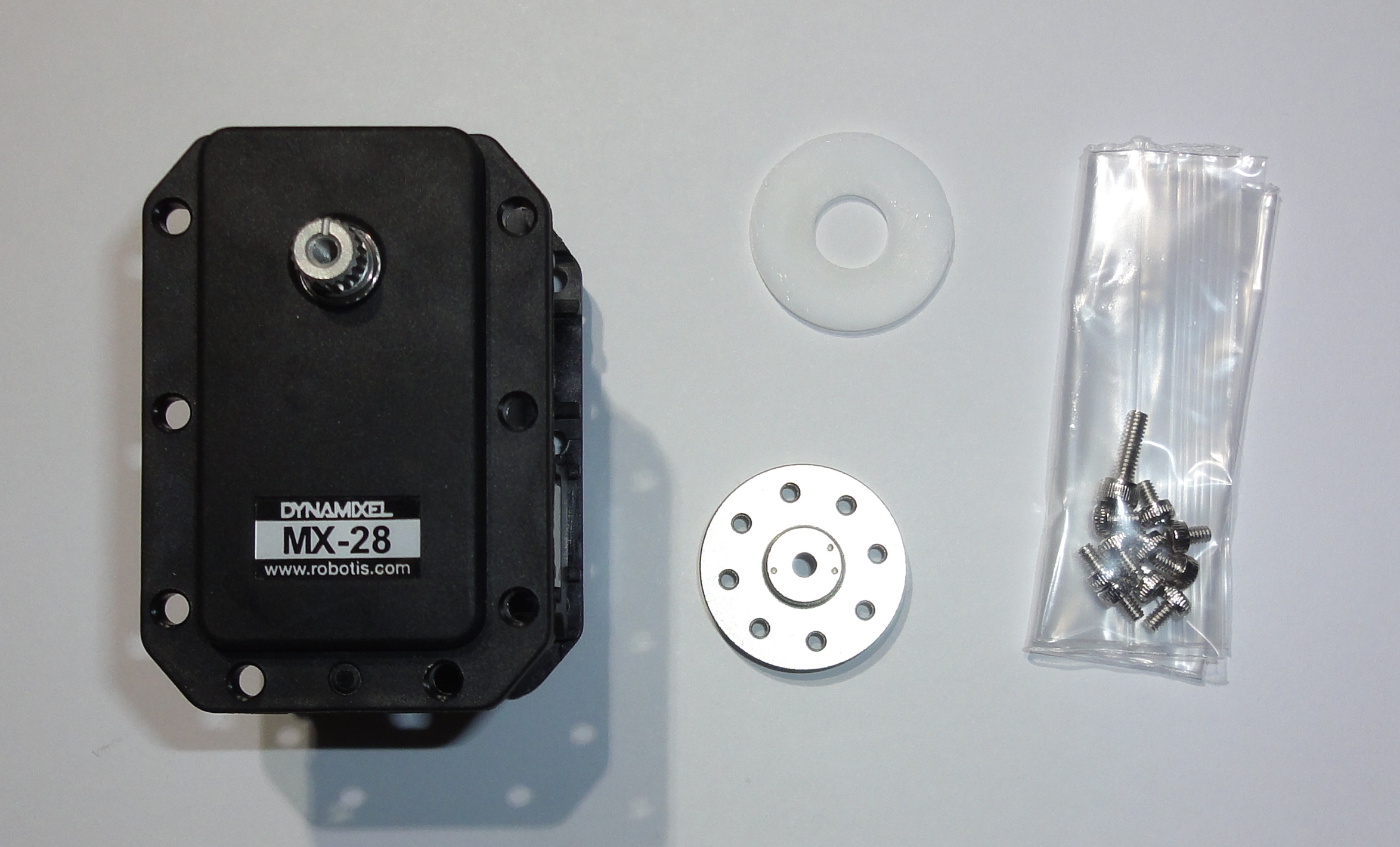
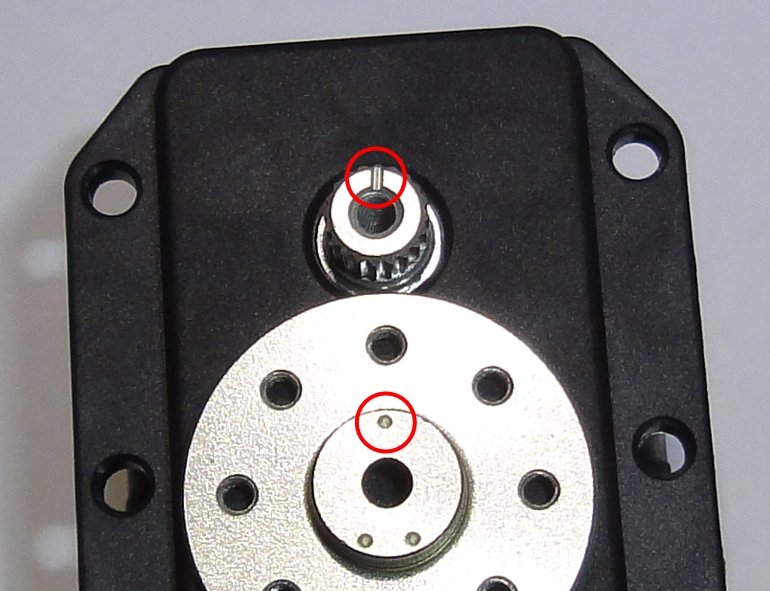
Así que junté suficientes argumentos para convencerme de hacer uno, minimizando algunos temas como el costo de sus sofisticados y caros servos Dynamixel MX-28T que hay que comprar (y son 20… pero eso se puede estirar un poco a medida que se hace la construcción).
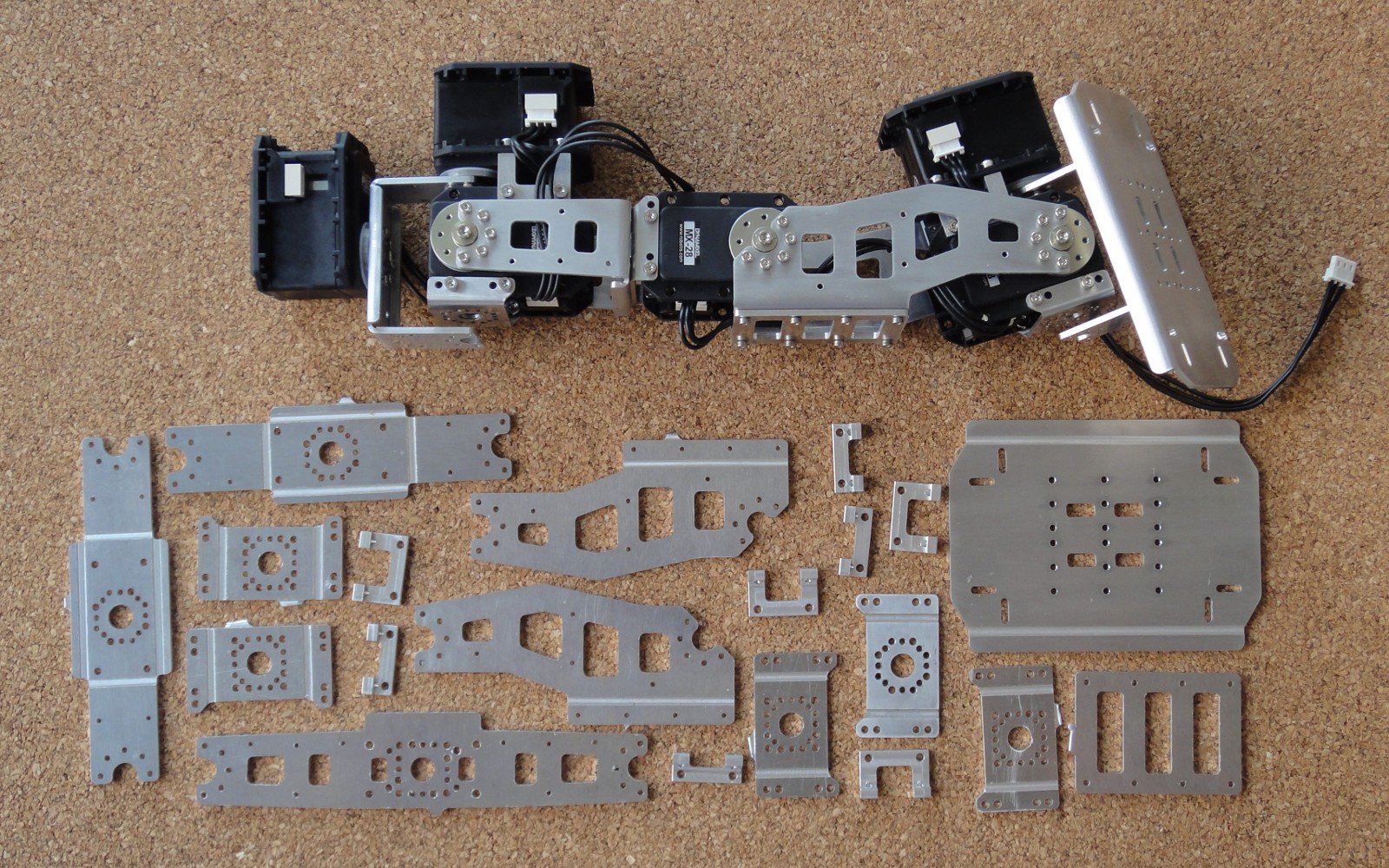
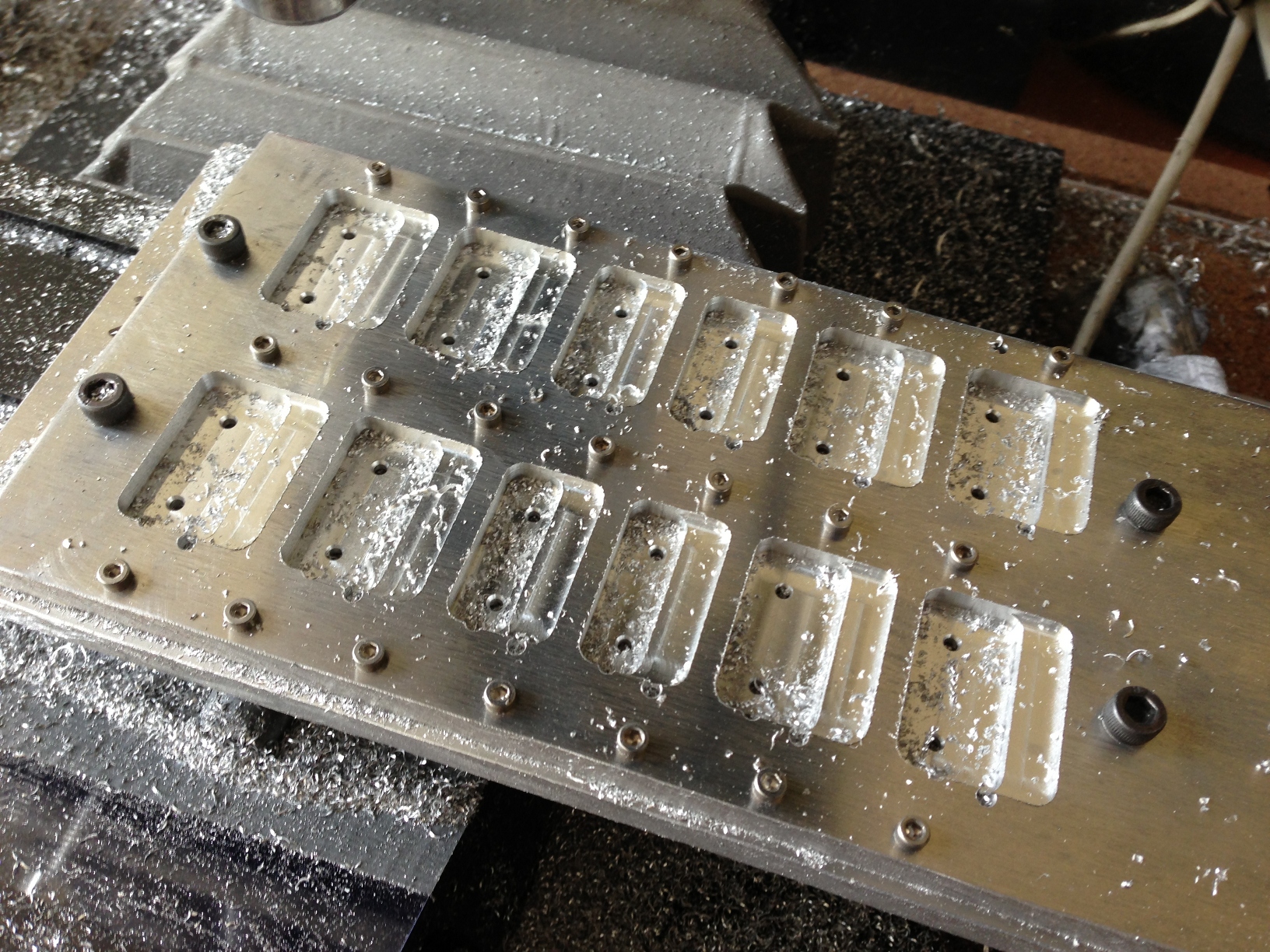
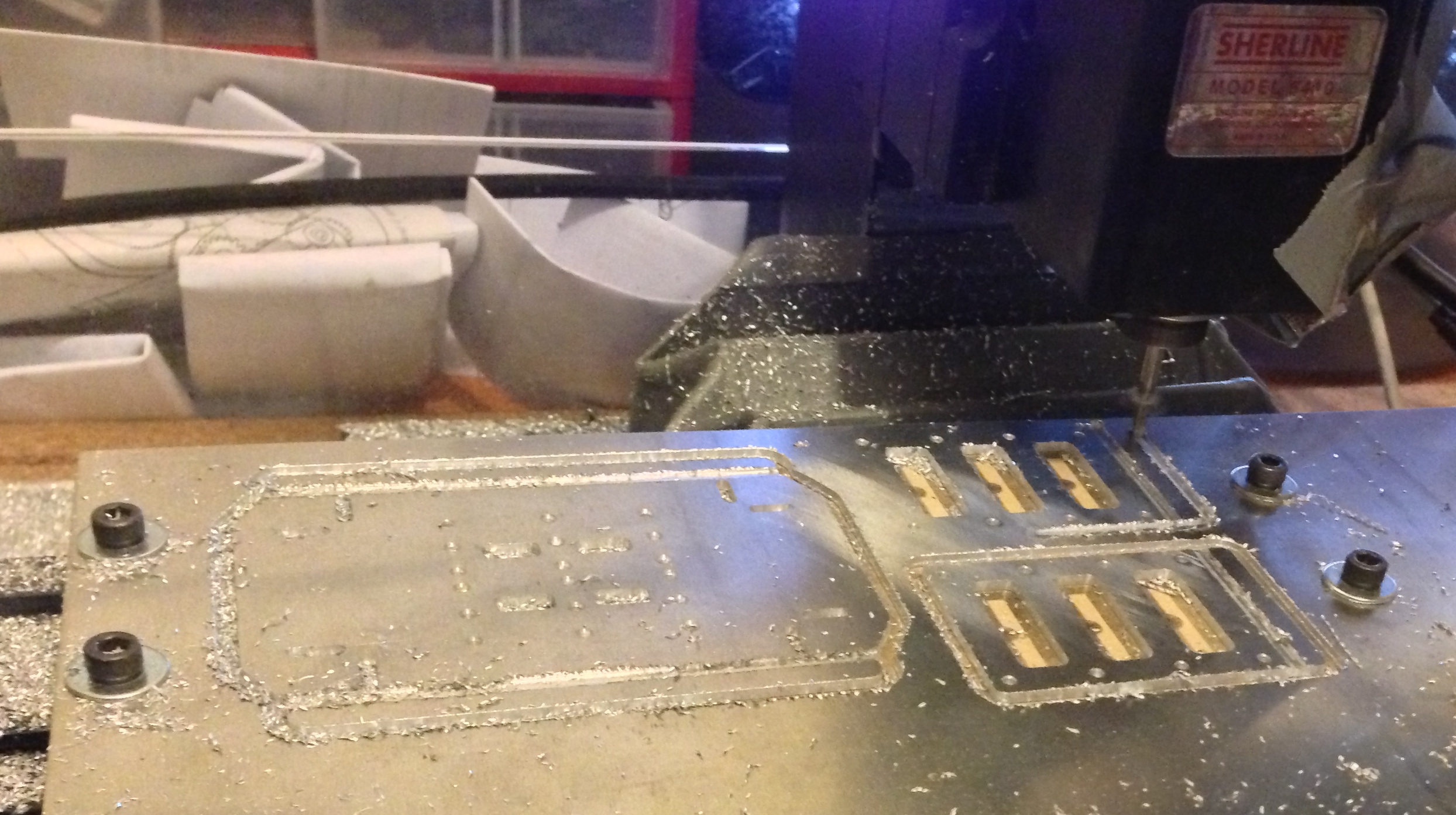
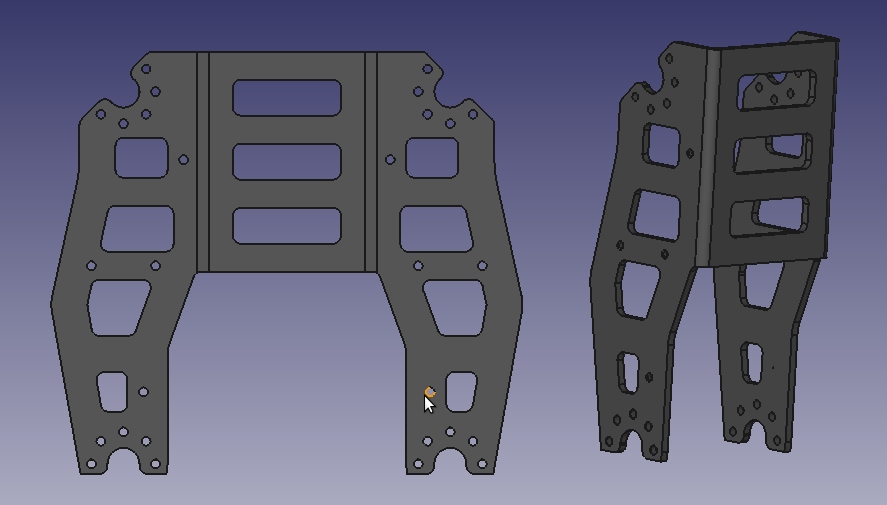
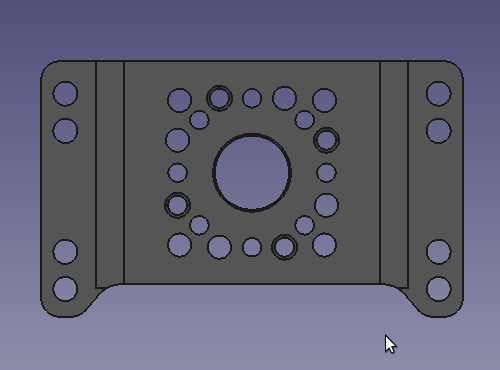
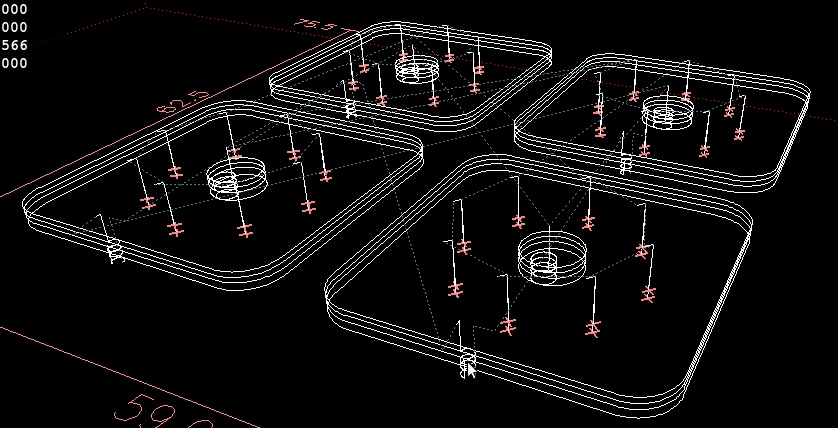
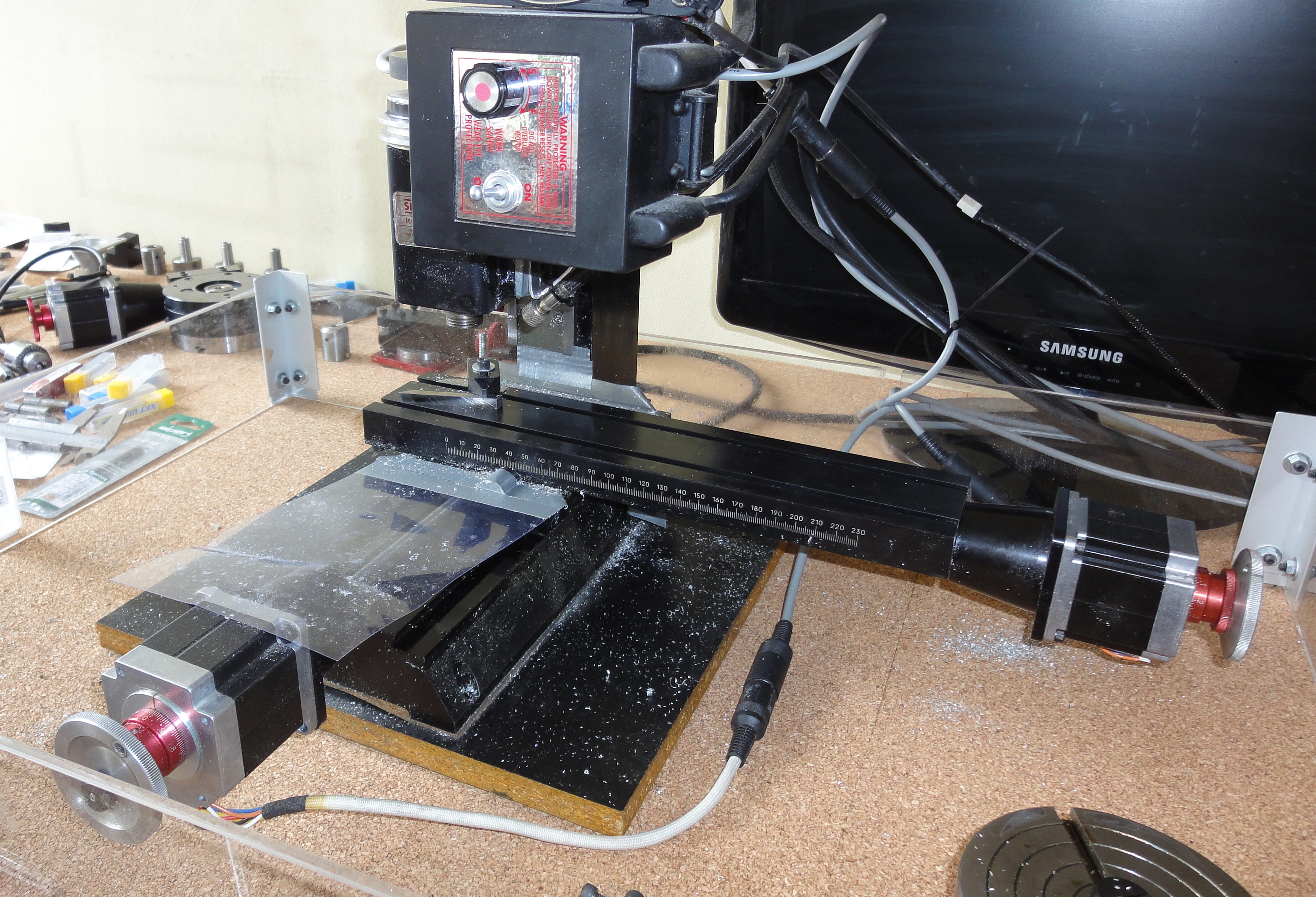
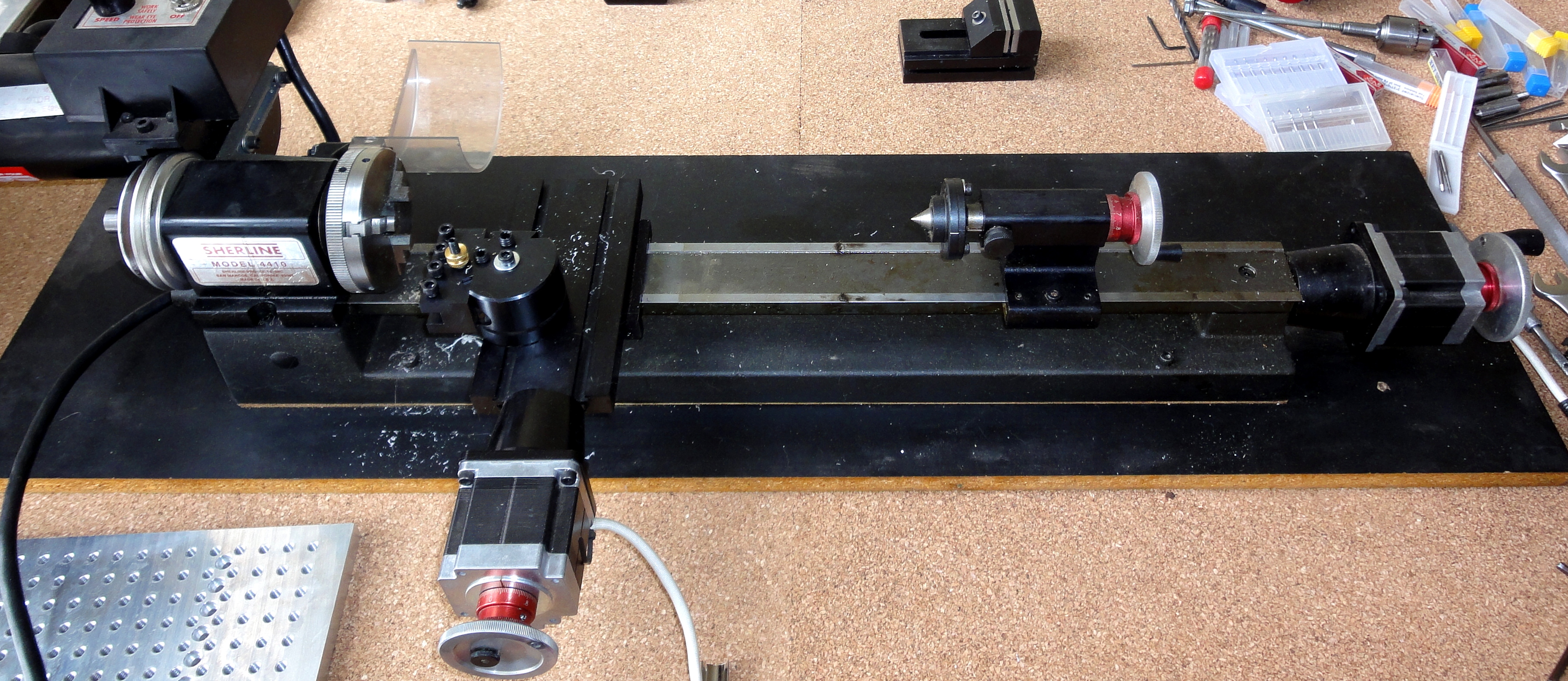
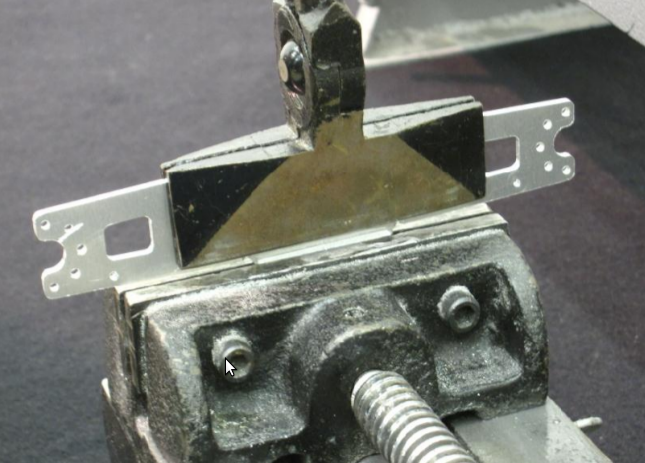
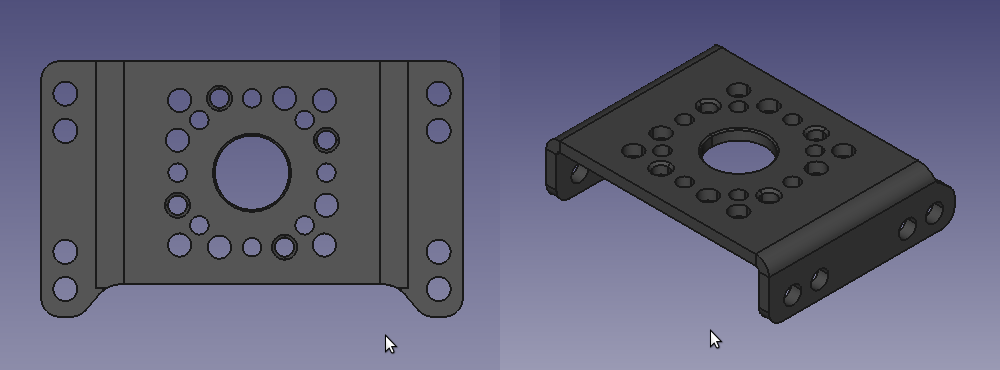
Pretendo hacer la estructura de aluminio como se diseñó originalmente, usando máquinas de CNC para hobbistas. Usaré impresión 3D para las cubiertas de plástico. Sobre la electrónica decidiré más adelante si uso la placa madre Atom original o si hago una ‘mejora’ con algo más poderoso, quizás con cpu ARM, el Cortex-A15 puede salir pronto en un tamaño de placa madre adecuada. Decidí no reemplazar los servos por una alternativa más barata para no agregar un grado de dificultad más, hay suficiente con todo el resto.