Después de 6 meses de pausa, estoy retomando mi proyecto de construir un clon del robot DARwIn-OP.
El primer paso es corregir un error con un plugin multi-lenguaje de WordPress que estaba produciendo problemas con los posts en español e inglés desde hace un tiempo.
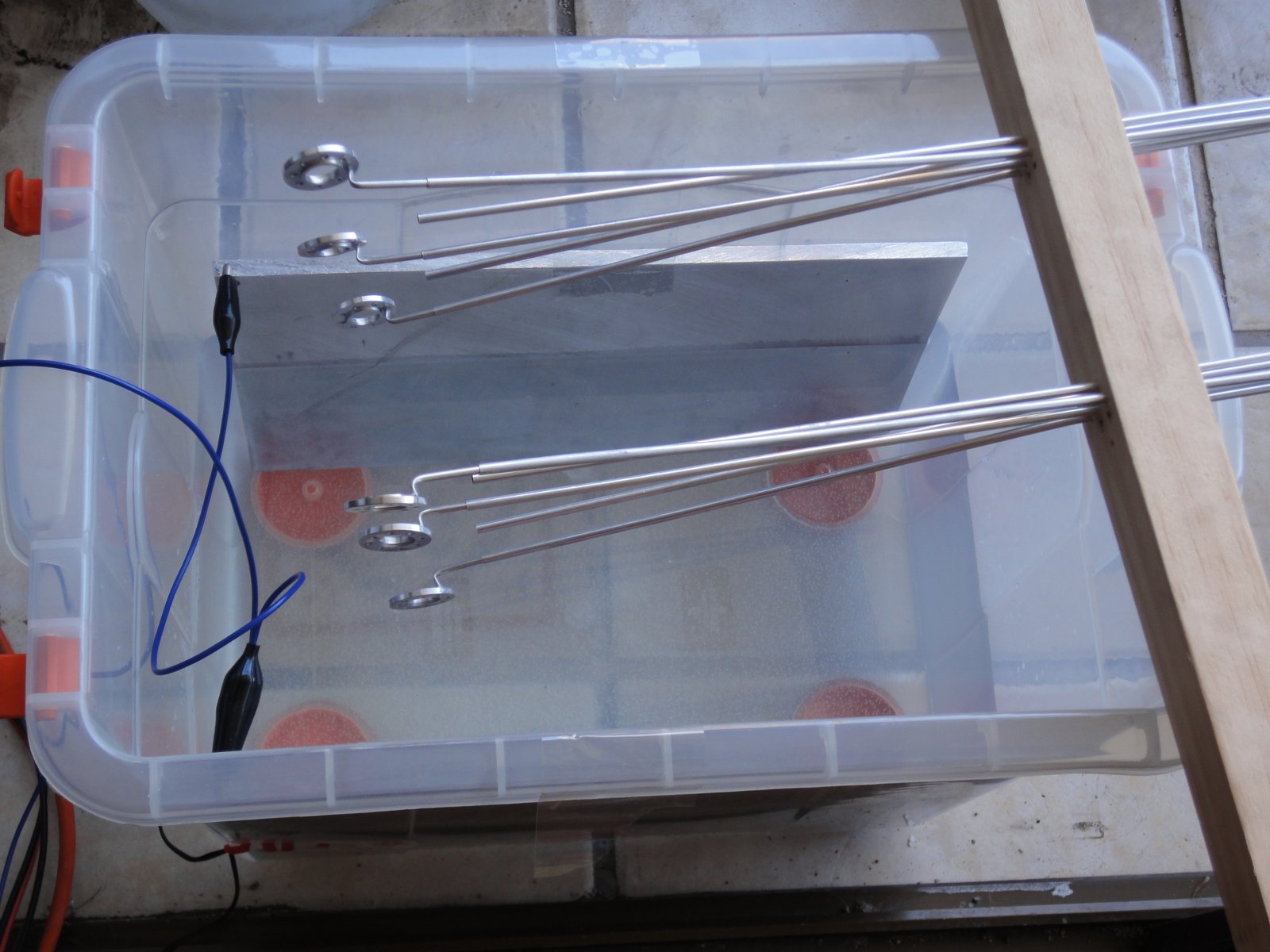
Después de hacer algunas pruebas, terminé con las ruedas volantes anodizadas, todavía estoy esperando que llegue tintura negra, pero estas ruedas volantes son color natural.
Rueda Volante Anodizada
El procedimiento usado es:
Pulir las piezas
Lavar las piezas y enjuagarlas en agua destilada.
Baño de 1 minuto en hidróxido de sodio (10g/L).
Anodizado Tipo II por 60 minutos: 12A/Ft² con ácido sulfúrico al 15% (ácido de matería diluido 50/50 con agua destilada) a 20°C.
Hervir por 30 minutos en agua destilada.
Como hice algunas pruebas de piezas con aluminio 2011, las usé para probar el anodizado primero. La terminación de la superficie depende de la aleación usada. Con aluminio 6061 obtuve una mejor terminación.
Pieza de Aluminio 6061 Anodizado arriba, prototipo de Aluminio 2011 abajoPreparando un Lote para Anodizar
Obtuve algunas piezas con marcas de anodizado, en especial unas pocas tapas de rodamiento. Por lo menos tengo algunas sobrantes y son fáciles de hacer. Vi un tutorial en YouTube en que enfatizan que las piezas nunca están suficientemente limpias para anodizar. De todas formas, necesito investigar y probar más antes de anodizar y teñir el resto de las partes del DARwIn-OP.
Ejemplo Falla en Anodizado de Tapa de Rodamiento
También voy a probar con un baño de hidróxido de sodio más largo, el engrosamiento de las piezas por la capa de anodizado es notoria ya que los rodamientos quedan más ajustados, así que hay espacio para un baño más largo (que carcome un poco de la superficie).
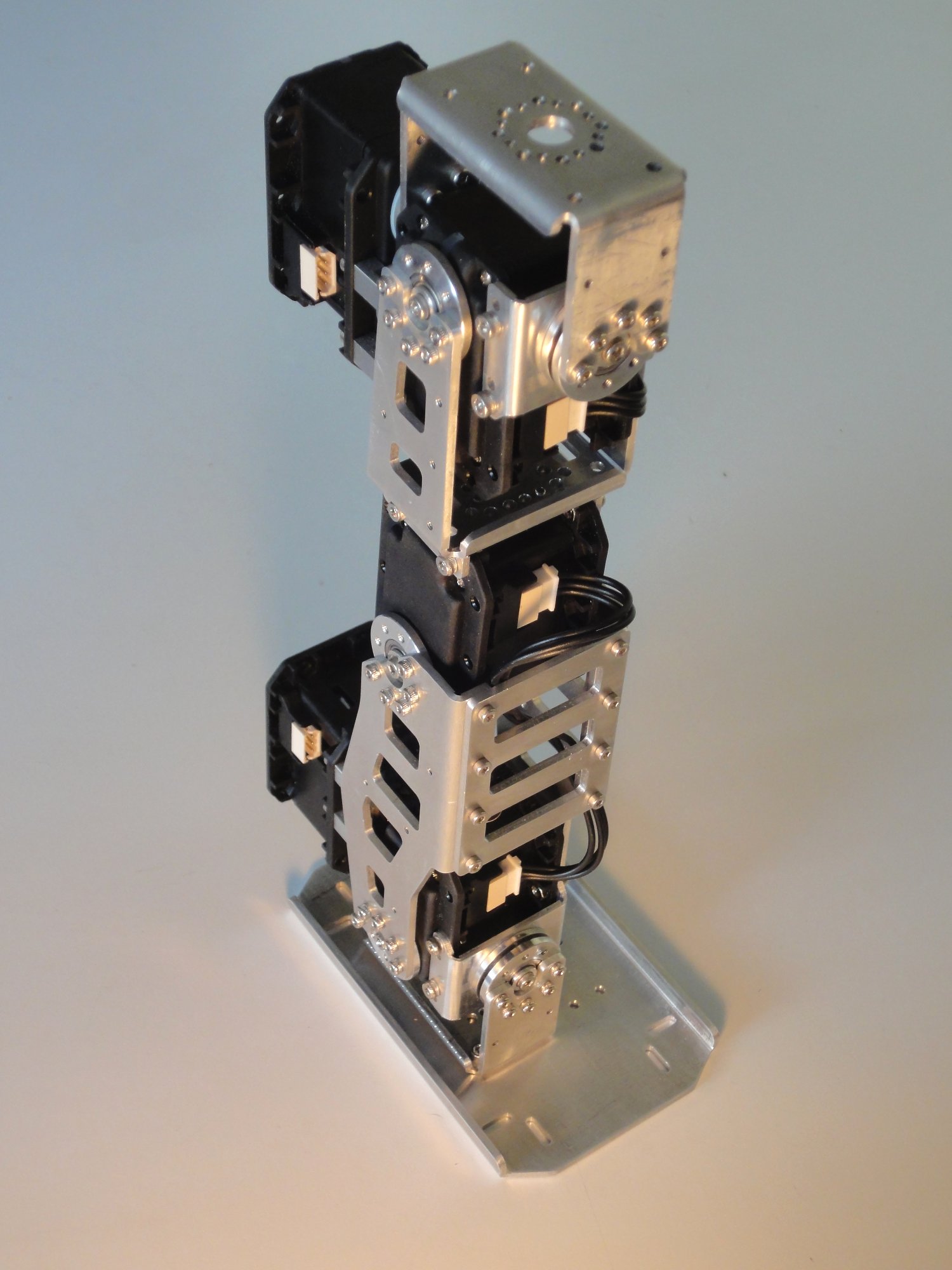
Ahora que terminé los FR07_F101 (Flange Bearings) y algunos HN07_I101 (Bearing Idlers), estoy haciendo una prueba de ensamblado completa de la primera pierna de mi clon de DARwIn-OP.
Ensamblado de una pierna completa de DARwIn-OP
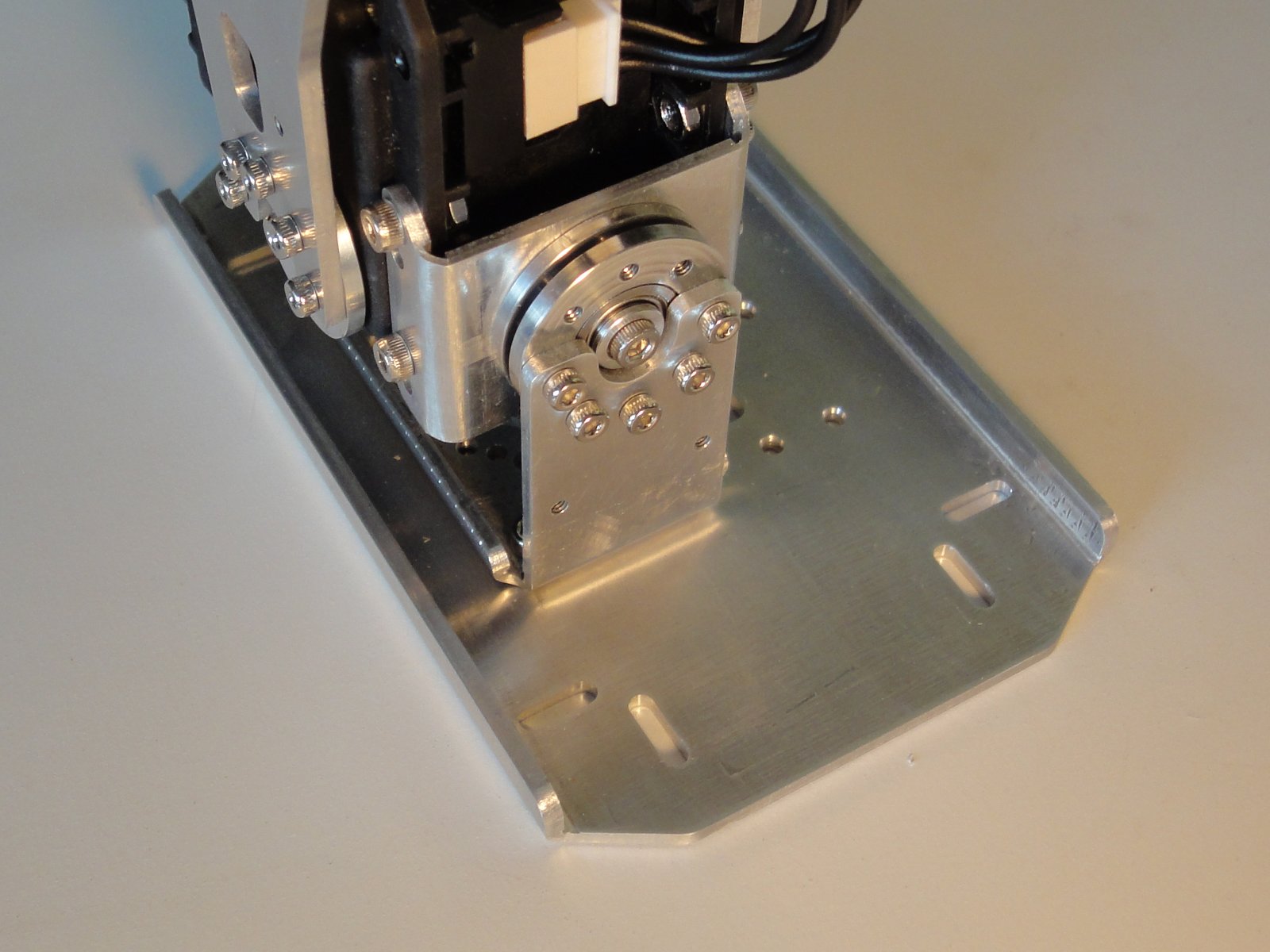
Después de ajustar los pliegues de las piezas FR07_H120, las ruedas volantes alinean perfectamente.
Rueda volante instalada
Ahora voy a continuar fabricando el resto de los HR07_I101 (Bearing Idlers, me faltan 9 todavía) antes de empezar a plegar las piezas de la segunda pierna y seguir con la cintura para arriba. De todas maneras estoy esperando tinta negra para anodizar las piezas.
Casi decidí comprar las 4 piezas FR07_F101 (Flange Bearings) necesarias para clonar el robot DARwIn-OP. Pero finalmente me tomó sólo una tarde cortarlas en torno, hacer los agujeros en la fresadora y terminar con los hilos de 2mm.
Patrón de agujeros en un FR07_F101Cuatro FR07_F101
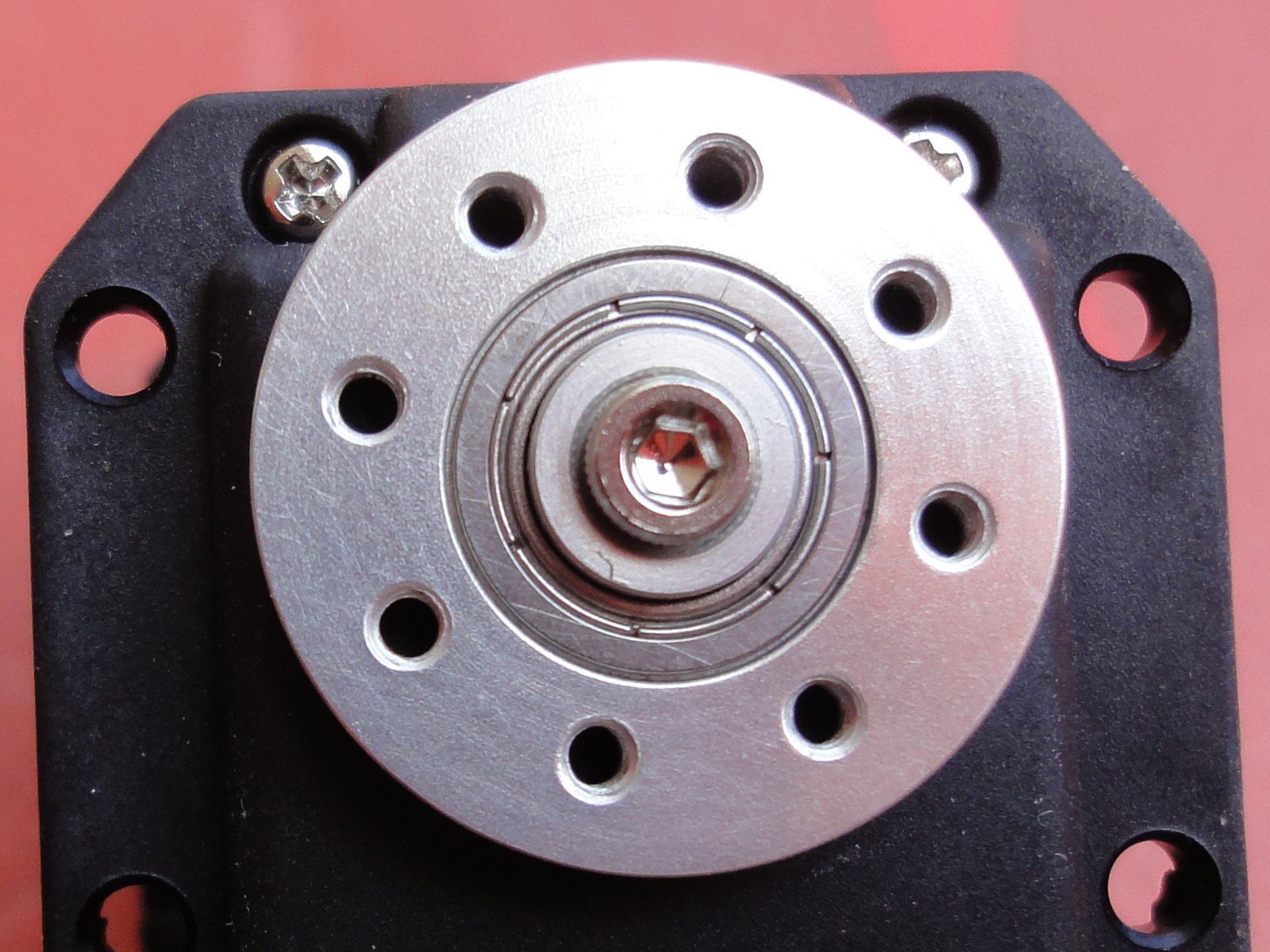
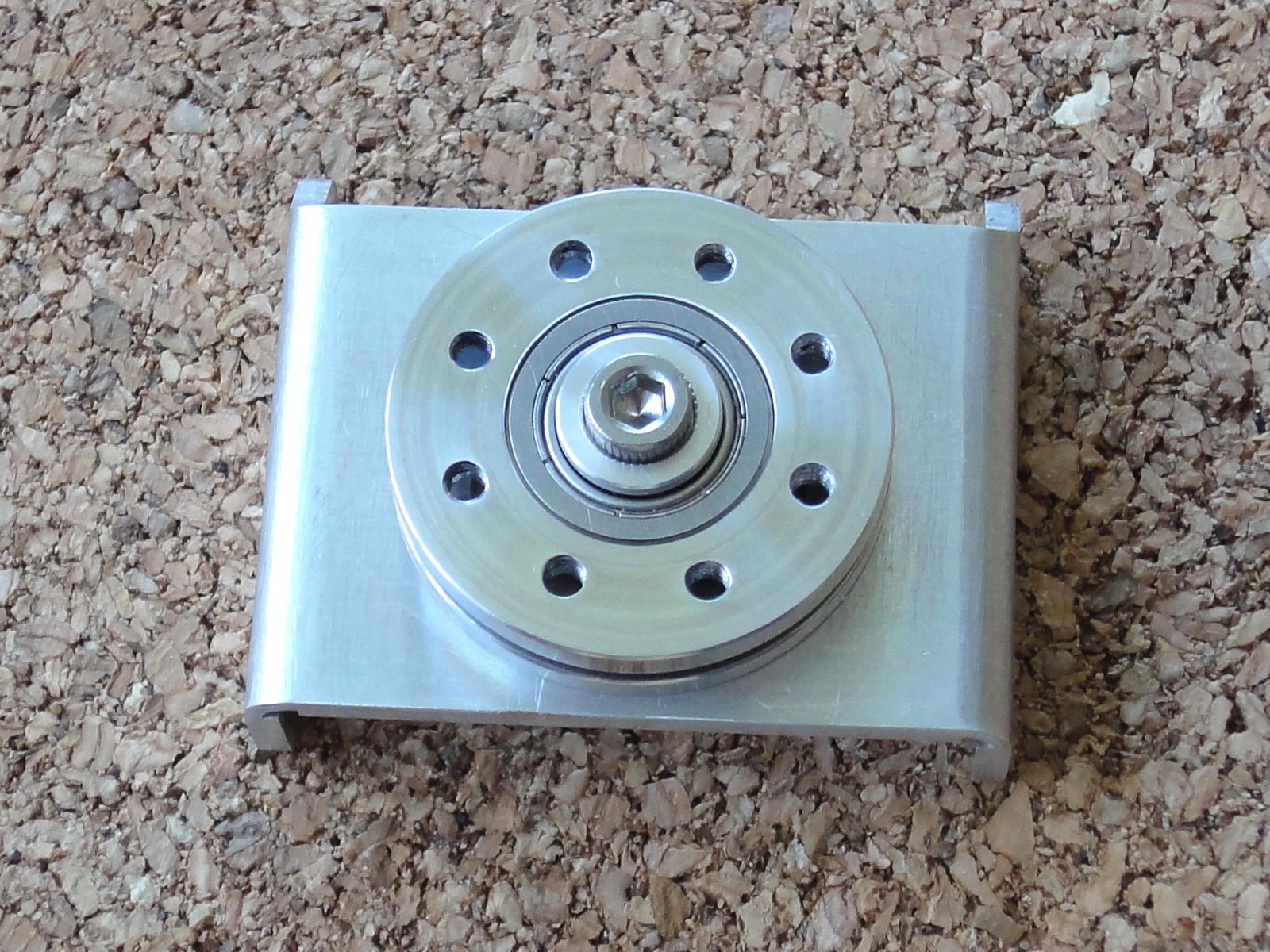
Probé el ensamblado de la juntura volante como se describe en el Manual de Ensamblado del DARwIn-OP. No he anodizado las piezas y parece que no va a ser fácil desensamblarlas, quedan bien apretadas.
Juntura volante ensamblada
Los programas de corte gcode están en la Sección de Código y zipeados en la Sección de Archivos en el repositorio sourceforge para clonar el Robot DARwIn-OP.
Ahora puedo continuar probando el ensamblado completo de una pierna de mi clon de DARwIn-OP.
Estoy partiendo con la tapa del rodamiento (Bearing Cap) que es la pieza más fácil de hacer en un torno.
15 Tapas es suficiente para un robot DARwIn-OP básico
15 Tapas de Rodamiento (Bearing Caps)
El programa de corte gcode está en la Sección de Código y zipeado en la Sección de Archivos en el repositorio sourceforge para clonar el Robot DARwIn-OP.
Recibí los rodamientos MF106ZZ y unas barras de aluminio 6061 para mi clon de robot DARwIn-OP.
Rodamientos MF106FF
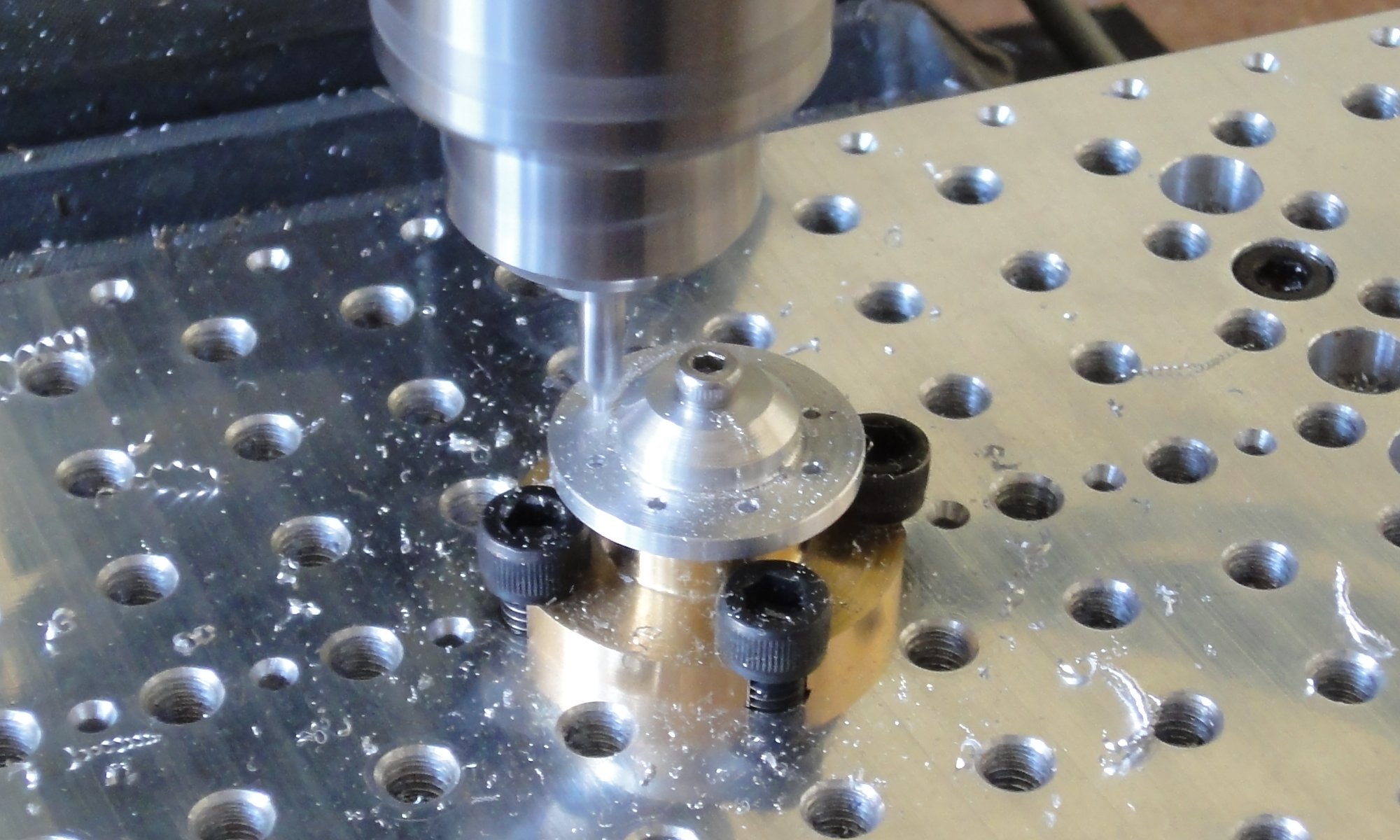
Corté algunos HN07-I101, and RX28-CAP en mi torno igual que mis cortes de pruebas. También diseñé una herramienta para sujetar los HN07-I101 y FR07-F101 para hacerles los patrones de agujeros.
Herramienta de sujeción con un HR07-I101 recién torneado y uno original en la derecha
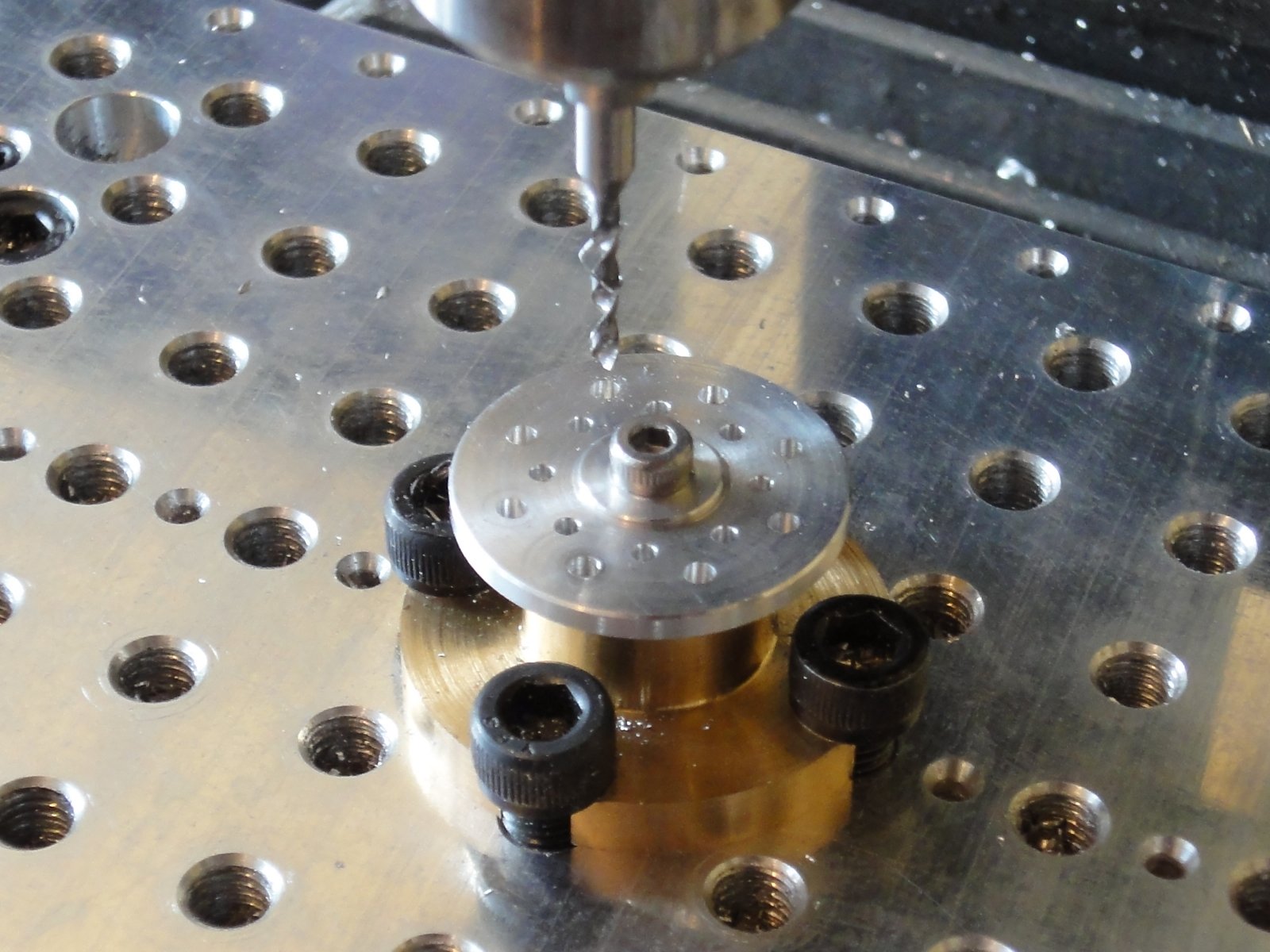
El patrón de agujeros es hecho con una fresadora Sherline usando una broca centro #1 y una broca de 1.6mm.
Patrón de agujeros en un HR07-I101
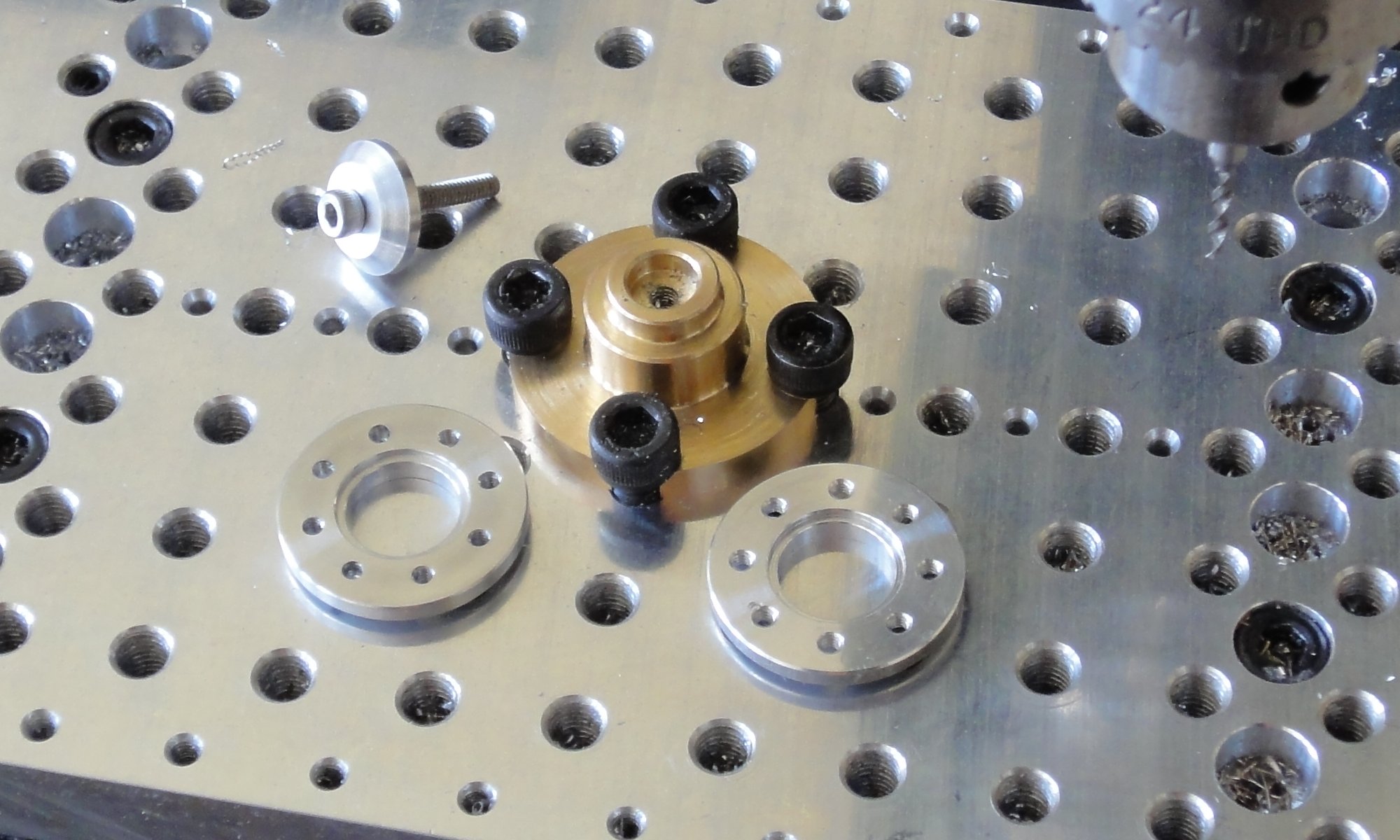
Finalmente se le hace hilo de 2mm al HR07-I101.
Un HR07-I101 terminado a la izquierda y uno original a la derecha
Los programas gcode de corte están en la Sección de Código y zipeados en la Sección de Archivos en el repositorio sourceforge para clonar el Robot DARwIn-OP. La herramienta es torneada en un torno y terminada en una fresadora para poder apernarla.
HN07-I101 y RX28-CAP (cortes de prueba a la izquierda y original a la derecha)
Logré cortar el HN07-I101 y el RX28-CAP. Tengo un set original que compré por lo que puedo compararlos, el rodamiento calza lo suficientemente justo. Todavía tengo que hacer los agujeros, pero haré algunas herramientas para hacerlos en la fresadora. Además tengo que pulirlos y anodizarlos.
Usé unos restos de aluminio 20XX que tenía, una barra de 1″ para el HN07-I101 y una barra de 5/8″ para el CAP, todavía estoy esperando unas barras de 15/16″ y 3-8″ de aluminio 6061 para hacer las piezas finales. El código G-code de corte está en la Sección de código de mi proyecto sourceforge, requieren una configuración de cambio rápido (o automática) con este setup de herramientas.
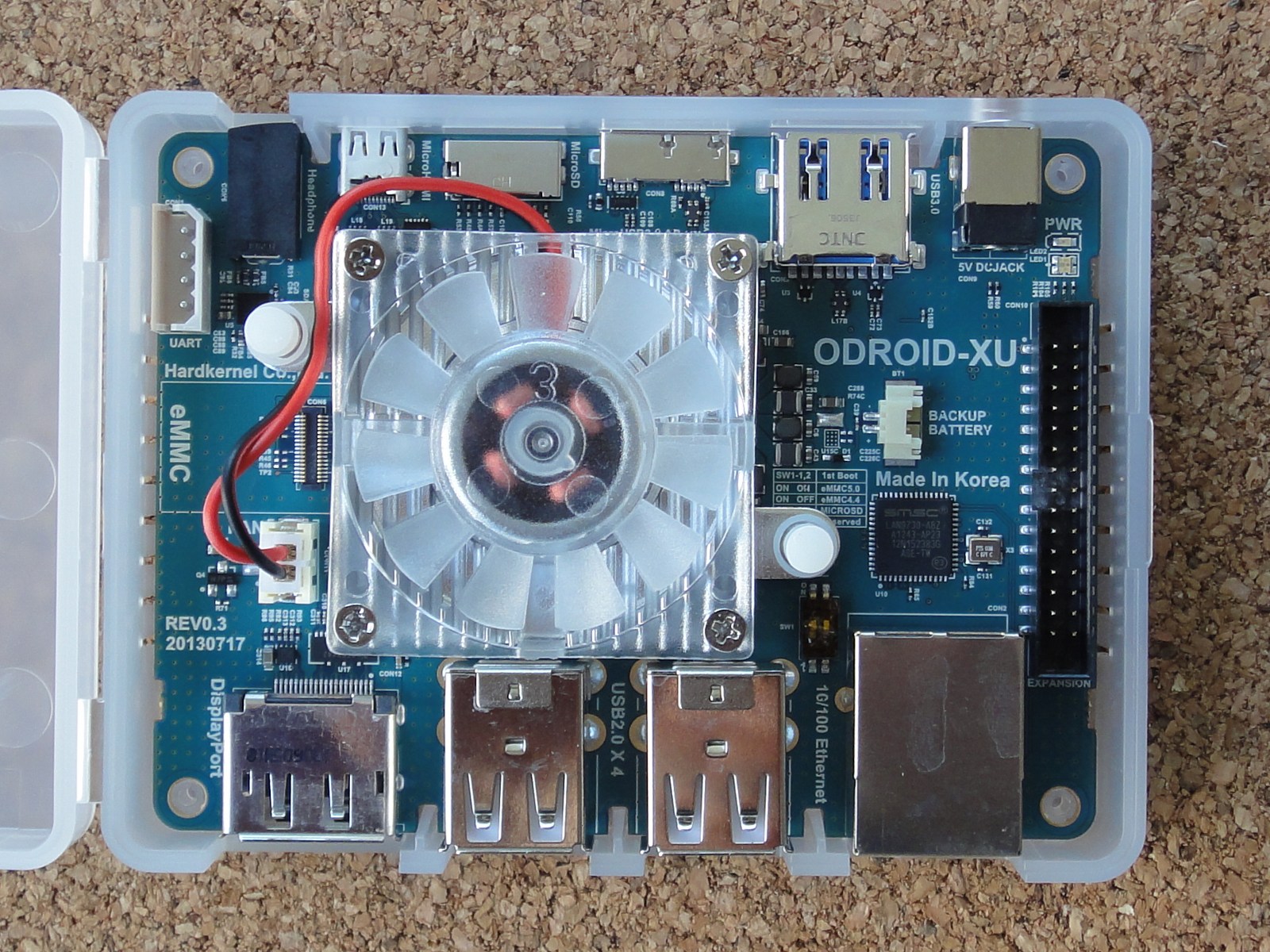
Hoy recibí mi placa ODROID-XU (ARM Cortex-A15). Mientras escribía el post Prueba de Pierna Clon de DARwIn-OP me fijé que HardKernel estaba haciendo una preventa de la placa. Compré una y me llegó muy rápido!
ODROID-XU
Las specificaciones son:
– Arquitectura ARM big.LITTLE.
– Exynos 5410 Octa, con 4 CPUs Cortex-A15 1.6GHz y 4 CPUs Cortex-A7 1.2GHz.
– 2GB de RAM.
– Ethernet de 100Mbps.
– Corre Android o Ubuntu.
– Puede usar SD o un módulo eMMC (8 a 64GB) como disco duro.
– 2 puertos USB 3.0 y 4 puertos USB 2.0.
– tamaño de placa: 94x70mm.
La placa es muy pequeña y de bajo perfil, debería ser una buena elección para mi clon del robot DARwIn-OP. El módulo eMMC viene con Android preinstalado, así que voy a instalar Ubuntu y hacer unas pruebas.
Empecé a subir los archivos de gcode para la primera pieza (fr07_s101).
Los archivos están en la sección de Código en un repositorio Subversion. Bajo la carpta mill están los archivos gcode y el archivo de texto 00_README.TXT explicando el uso. Seguiré subiendo a medida que revise y limpie los archivos del resto de las piezas.