Después de hacer un poco de investigación. decidí configurar mi Prototipo de Driver Dynamixel con Teensy 3.2 para mi DARwIn-OP de forma de eliminar el código de retransmisión del loop:
void loop()
{
if (Serial1.available())
{
uint8_t c = Serial1.read();
Serial1.write(c);
}
}
Este loop simplemente espera por un byte recibido por la UART y lo retransmite en la misma UART, la cual está configurada con un pin de dirección por hardware (RTS manejado por el transmisor).
Si pudiera usar el controlador DMA (Direct Memory Access) del Teensy para hacer la retransmisión, podría vaciar el código loop y utilizar el Teensy para otras tareas sin afectar el rendimiento de la retransmisión.
Los requerimientos para el DMA son bien simples:
Gatillar un requerimiento DMA cuando 1 byte es recibido por la UART.
La transferencia DMA tiene que ser de 1 byte.
La transferencia DMA debe leer desde el registro de DATA de la UART (data recibida).
La transferencia DMA debe escribir en el registro de DATA de la UART (para retransmisión).
No se tiene que involucrar la CPU en el proceso, no debe necesitarse eventos de interrupción o pooling.
Mirando a las capacidades del DMA de la CPU ARM MK20DX256VLH7 del Teensy, se ve factible, quedando operativo después de algunas pruebas.
Ahora la retransmisión tiene una latencia menor y un timing más parejo:
Teensy con UART manejada por DMA
Las señales en el gráfico son:
RX del Teensy (viene del TX del Odroid).
TX del Teensy.
Pin de Dirección por Hardward.
La codificación ahora tiene un setup más grande para configurar el DMA y la UART (la API serial del Teensy ya no es útil), pero la función loop() ahora está vacía:
#define UART_TXRTSE (2)
#define UART_TXRTSPOL (4)
#define BAUD_RATE (1000000)
void setup()
{
int divisor = BAUD2DIV(BAUD_RATE);
// DMA:
// p 415 source address = uart data register
DMA_TCD1_SADDR = &UART0_D;
// p 415 source address offset
DMA_TCD1_SOFF = 0;
// p 416 transfer attributes: 8 bits
DMA_TCD1_ATTR = 0;
// p 417 minor byte count = 1 byte
DMA_TCD1_NBYTES_MLNO = 1;
// p 420 last source address adjustment = 0
DMA_TCD1_SLAST = 0;
// p 420 destination address = uart data register
DMA_TCD1_DADDR = &UART0_D;
// p 421 destination address offset
DMA_TCD1_DOFF = 0;
// p 423 channel link disabled
DMA_TCD1_CITER_ELINKNO = 1;
// p 423 last destination address adjustment = 0
DMA_TCD1_DLASTSGA = 0;
// p 427 channel link disabled
DMA_TCD1_BITER_ELINKNO = 1;
// p 424 control and status = 8 cycle stall, active
DMA_TCD1_CSR = DMA_TCD_CSR_BWC(3) | DMA_TCD_CSR_ACTIVE;
// p 402 enable DMA REQ channel 1.
DMA_SERQ = DMA_SERQ_SERQ(1);
// clock setup
// p 252-259 system clock gating
SIM_SCGC6 |= SIM_SCGC6_DMAMUX;
SIM_SCGC7 |= SIM_SCGC7_DMA;
SIM_SCGC4 |= SIM_SCGC4_UART0;
// wait for clocks to become stable.
delay(500);
// p366 dma mux channel configuration
DMAMUX0_CHCFG1 = DMAMUX_ENABLE | DMAMUX_SOURCE_UART0_RX;
// UART:
// p 1222 UART0 Control Register 5 request DMA on receiver full
UART0_C5 = UART_C5_RDMAS;
// RX TX pins
CORE_PIN0_CONFIG = PORT_PCR_PE | PORT_PCR_PS |
PORT_PCR_PFE | PORT_PCR_MUX(3);
CORE_PIN1_CONFIG = PORT_PCR_DSE | PORT_PCR_SRE |
PORT_PCR_MUX(3);
// p 1208 uart0 baud rate
UART0_BDH = (divisor >> 13) & 0x1F;
UART0_BDL = (divisor >> 5) & 0xFF;
UART0_C4 = divisor & 0x1F;
UART0_C1 = UART_C1_ILT;
UART0_TWFIFO = 2; // tx watermark
UART0_RWFIFO = 1; // rx watermark
UART0_PFIFO = UART_PFIFO_TXFE | UART_PFIFO_RXFE;
UART0_C2 = UART_C2_TE | UART_C2_RE | UART_C2_RIE;
// enable PIN 6 as hardware transmitter RTS with active HIGH.
CORE_PIN6_CONFIG = PORT_PCR_MUX(3);
UART0_MODEM = UART_TXRTSE | UART_TXRTSPOL;
}
void loop()
{
}
En realidad, por ahora ejecuto el típico ‘blink’ en la funcion loop() para saber que el Teensy está corriendo.
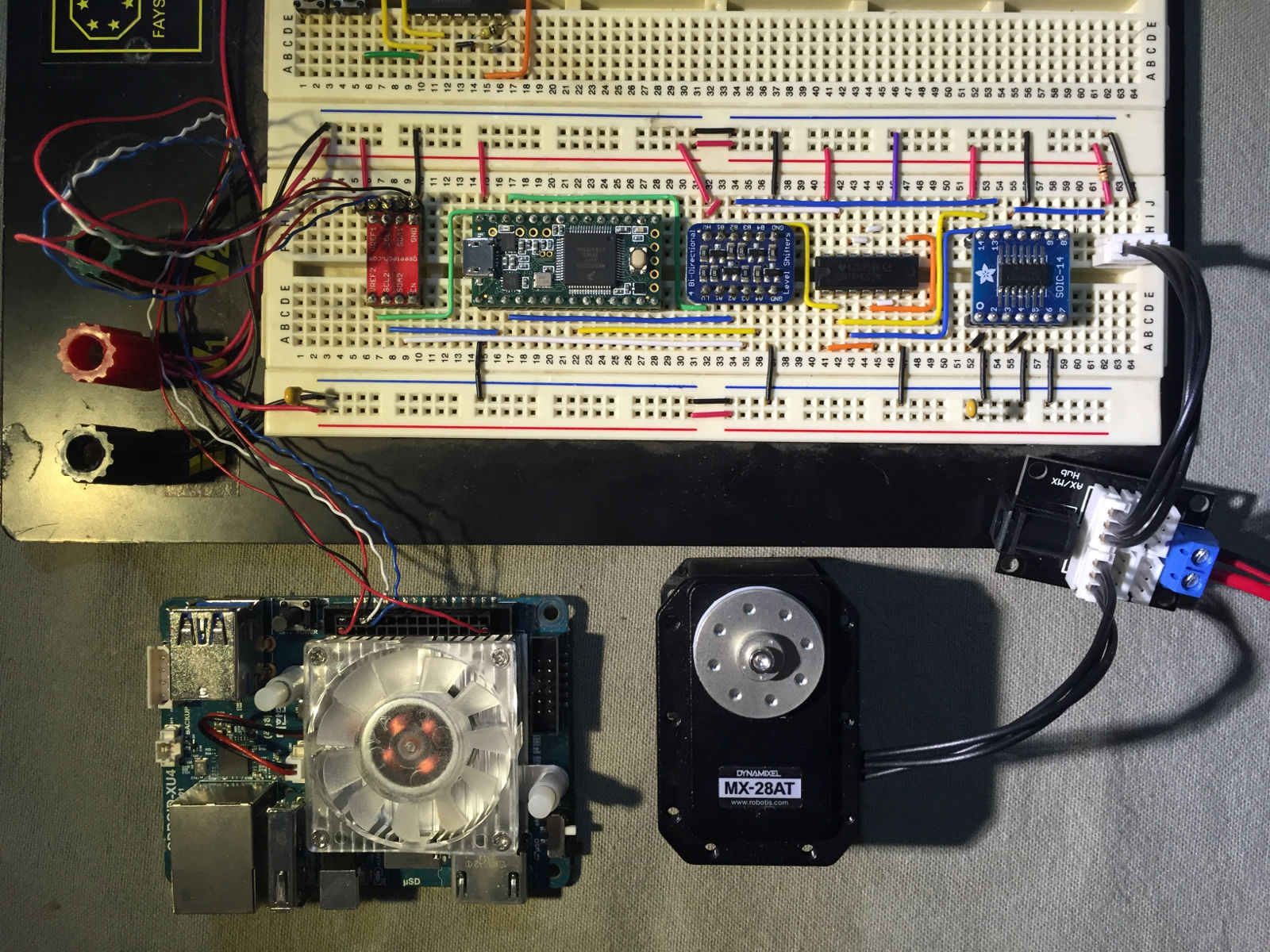
Reemplacé my prototipo TTL inicial con un Teensy 3.2, éste es una placa de desarrollo con una CPU ARM de 32 bits y 72MHz en un formato pequeño de 35×18 mm.
Setup de Odroid-XU4, Teensy 3.2 y Servo MX-28
Seleccioné esta placa porque tiene varias interfaces seriales (UART) que soportan:
1 y 3 Mbps, velocidades que pueden ser usados con el servo MX-28.
Un pin de dirección por hardware. Su RTS por hardware puede indicar cuándo la UART está transmitiendo (al configurar que el RTS sea generado por el transmisor de la UART en vez del receptor de la UART), lamentablemente el Odroid-XU4 (como varias otras plataformas) no soporta esta opción por lo que he visto de la documentación disponible.
También el sitio web del Teensy se ve bastante bueno.
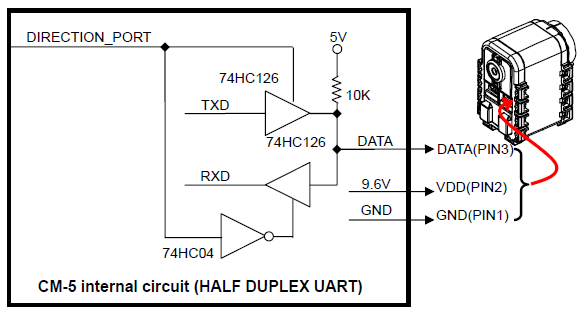
Robotis documenta este setup para conectar una UART al bus Dynamixel. Requiere una UART, un pin de dirección y lógica de 5V:
Interfaz de Robotis para Bus Dynamixel
Así, al poner el Teensy 3.2 entre el Odroid-XU4 y el bus Dynamixel, puedo generar el pin de dirección por hardware en vez de una implementación por software que puede tener problemas de timing.
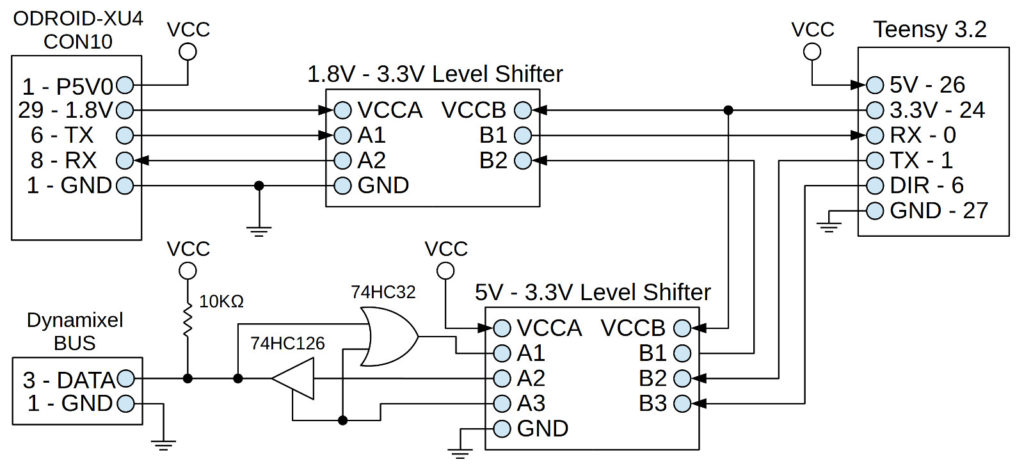
Este es un esquema simplificado del setup, cambié el buffer de recepción por una puerta OR para evitar colocar una resistencia pull-up:
Esquemático Odroid-XU4, Teensy 3.2, Dynamixel
Este esquemático usa sólo una UART del Teensy. La función del Teensy es sólo retransmitir al bus Dynamixel y generar el pin de dirección. Mientras tando la señal de retorno del Bus va directo al Odroid, no hay necesidad de pasarla por el Teensy. De esta forma, este setup se puede usar con otros micro-controladores que sólo cuentan con 1 UART, además que no hay retardo extra en el retorno. El Odroid provee 1.8V y 5V que alimentan al Teensy y a los level shifters y el Teensy provee 3.3V que también alimenta a los level shifters.
Probablemente mi setup final use 2 UARTs del Teensy, de forma que éste pueda generar un retorno al Odroid y participe como otro dispositivo en el bus Dynamixel (siguiendo su protocolo) de forma que cumpla alguna función como PWM o I/O análogo. Dependerá de si sobra suficiente tiempo libre en el bus para agregar más comandos, que ya está bien limitado con los 8ms del ciclo de control del software de DARwIn-OP.
La Documentación para la UART del sitio de Teensy es bien clara y se programa con un add-on IDE de Arduino llamado Teensyduino.
El siguiente programa (que presenta problemas como se menciona luego) se deriva fácilmente de la documentación para retransmitir a través de la interfaz serial y con un pin de dirección:
void setup()
{
Serial1.begin(1000000);
Serial1.transmitterEnable(6);
}
void loop()
{
if (Serial1.available())
{
uint8_t c = Serial1.read();
Serial1.write(c);
}
}
En este ejemplo, el pin 6 es configurado como pin de dirección para señalar cuándo hay una transmisión en proceso.
En el lado del Odroid-XU4, se puede usar la librería estándar de Dynamixel, sólo se necesita cambiar el nombre del dispositivo serial que corresponde a /dev/ttySAC0 para la UART del conector 10 expansión del Odroid.
Esta configuración con un servo MX-28 a 1Mbps funciona. Pero 2 cosas no funcionan como planificado:
Hay un retardo de como 5 bytes (50 us) en la retransmisión. Yo estaba esperando sobre 1 byte pero no tanto.
El pin de dirección 6 no funciona correctamente siempre (esto no se notó incialmente).
Retardo de Retransmisión
Retardo de Retransmisión en Teensy
La Documentación de la CPU MK20DX256VLH7 del Teensy describe en el capítulo 47 la interfaz UART. En la sección 47.3.21 describe el registro UART_RWFIFO que configura el umbral del buffer de recepción para notificar a la CPU vía interrupción, su valor es 1 después del reset.
Al revisar el código fuente de la librería Serial1.begin(), se ve que este umbral UART_RWFIFO es incremendado a 4. Esto permite bajar el uso de CPU al recibir data, pero agrega latencia. También, la librería maneja la UART vía interrupciones así que la CPU sabe que llega data sólo después de la recepción de los primeros 4 bytes (si se hubieran transmitido menos de 4 bytes también se notifica a la CPU por una interrupción de inactividad). La función Serial1.available() no interroga la UART, sino que revisa unos buffers en memoria que son llenados vía interrupciones.
Como estoy usando el Teensy sólo para retransmitir, bajé el umbral de vuelta a 1 byte modificando la función setup así:
void setup()
{
Serial1.begin(1000000);
Serial1.transmitterEnable(6);
// set receiver buffer threshold for interrupt back to 1.
uint8_t c2 = UART0_C2;
UART0_C2 = c2 & ~UART_C2_RE; // disable C2[RE] (receiver enable)
UART0_RWFIFO = 1; // set receiver threshold
UART0_C2 = c2; // restore C2[RE]
}
void loop()
{
if (Serial1.available())
{
uint8_t c = Serial1.read();
Serial1.write(c);
}
}
UART0_C2 y UART0_RWFIFO apuntan a los registros hardware de configuración y están definidos en las librerías de Teensy. La UART #0 de la CPU corresponde al objeto C++ Serial1.
Pin de Dirección con Falla
Después de hacer un test de estrés, 1 de cada 30 a 100 comandos al servo resultaban en un timeout esperando respuesta del servo. Después de varios intentos, logré capturar algunos casos de falla en la señal del pin de dirección:
Falla 1 Pin de Dirección – El servo responde, pero hay un byte de retorno inicial extra.Falla 2 Pin de Dirección – El servo recibe el byte #4 corrupto y no responde.
En los diagramas de captura digital, las señales son:
TX del Odroid-XU4
TX de retransmisión del Teensy 3.2
Pin de dirección del Teensy 3.2
Bus Dynamixel
RX de vuelta al Odroid-XU4
Normalmente, el pin de dirección funciona bien pero a veces se desactiva durante la transmisión. La falla 1 muestra un caso que no afecta al mensaje al servo, pero el Odroid recibe un byte 0xFF extra inicial. La falla 2 muestra un mensaje que se corrompe, el 4o byte en el bus dinamixel vale 63 pero debería valer 5.
Durante mi chequeo previo de la librería de Serial1, noté que la funcionalidad de transmitterEnable es implementada por software y no está usando la capacidad del RTS de hardware de la UART. Del análisis de señal se deduce que esta implementación por software no es correcta, como me interesa una solución por hardware, no intenté arreglar la librería, pero al menos noté un caso de carrera crítica no manejada apropiadamente.
Así que luego de revisar nuevamente la Documentación de la CPU ARM MK20DX256VLH7, encontré la solución por hardware en la sección 47.3.14, el registro de configuración UART_MODEM describe cómo configurar el RTS para indicar cuándo el transmisor de la UART está activo.
También, en este otro Documento ARM K20 se describe las múltiples configuraciones de pines de hardware. En el capítulo 8.1, lista cómo las diferentes señales internas de la CPU se pueden exponer en los pines externos. En particular, los pines de la CPU 25, 37 y 61 pueden ser configurados como RTS de la UART 0. Estos son pines de CPU y no de la placa Teensy. Este esquemático muestra que sólo 2 pines están disponibles en la placa: el pin 6 (corresponde al pin 61 de la CPU) y el pin 19 (pin 37 de la CPU). Después de buscar un poco más encontré ejemplos de código de cómo programar la configuración de un pin, en particular, el pin 6 para RTS (funcionalidad ALT3).
Esta es la versión final del setup que usa un pin de dirección por hardware, la llamada a la API Serial1.transmitterEnable() fue eliminada.
#define UART_TXRTSE (2)
#define UART_TXRTSPOL (4)
void setup()
{
Serial1.begin(1000000);
// set receiver buffer threshold for interrupt back to 1.
uint8_t c2 = UART0_C2;
UART0_C2 = c2 & ~UART_C2_RE; // disable C2[RE] (receiver enable)
UART0_RWFIFO = 1; // set receiver threshold
UART0_C2 = c2; // restore C2[RE]
// enable PIN 6 as hardware transmitter RTS with active HIGH.
CORE_PIN6_CONFIG = PORT_PCR_MUX(3);
UART0_MODEM = UART_TXRTSE | UART_TXRTSPOL;
}
void loop()
{
if (Serial1.available())
{
uint8_t c = Serial1.read();
Serial1.write(c);
}
}
El pin de dirección funciona correctamente y tiene mejor consistiencia en los timings:
Driver Teensy funcionando bien
Ahora me falta reducir este prototipo a una placa debajo del Teensy 3.2.
Como estoy usando un Odroid-XU3 (y pronto voy a actualizarlo con un Odroid-XU4) con un adaptador USB2AX para conectar los servos Dynamixel MX-28, me ha estado molestando el retardo USB del adaptador.
El USB2AX es un dispositivo USB 1.1 y el USB 1.1 tiene un entramado de 1ms para transmitir y recibir data. Cualquier
comando dynamixel toma al menos 2ms lo cual no es aceptable. Incluso usando los comandos bulk de lectura y escritura (los que toman incluso más tiempo en la medida que conecto más servos) me gustaría cumplir con el ciclo de control de 8ms del programa original del DARwIn-OP y me estoy acercando al límite.
Por suerte, como se describe en foro odroid, el UART del Odroid se puede configurar a la especificación del bus Dynamixel (8 bit, 1 stop, No Parity) a 1Mbps e incluso hasta 3Mbps!!!
Por lo que estoy trabajando en un driver para implementar la interfaz serial TTL half-duplex de Dynamixel con sólo los pines RX and TX del Odroid (sin usar ningún pin de control para comandar el half-duplex). De esta forma, se pueden usar UARTs simples como la que tiene el Odroid, que no tiene una salida por hardware para indicar una transmisión en proceso (y no quiero usar un gpio controlado por software para evitar errores de timing).
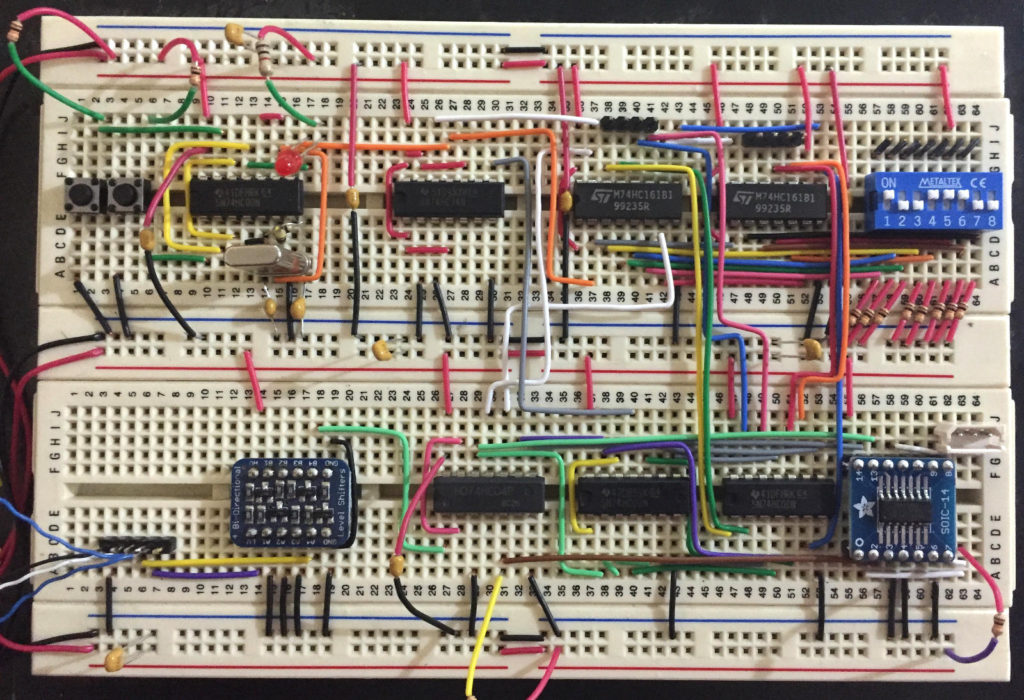
Por ahora hice un prototipo TTL (la UART del Odroid es de 1.8V, mientras que el bus Dynamixel es de 5V), pero voy a continuar reduciendo esto con un micro-controlador.
prototipo TTL de driver de servo
Antes de esto estaba trabajando en usar un UART SPI para reemplazar el USB2AX, pero eso se va a la basura ahora.
Continuando con mi clon de robot DARwIn-OP, estoy cortando las piezas de los hombros.
Después de cortar la mayoría de las piezas del robot, estoy llegando a un mejor setup para cortes en mi fresadora CNC Sherline.
Primero empecé sujetando las planchas de aluminio sobre pequeñas placas de madera MDF, cortando con fresas de 3mm, una broca centro y varias brocas (1,6mm, 2,0mm, 2,05mm, 2,5mm y 2,6mm), después pasé a usar una fresa de 2.5mm para mejor acabado en los rebajes. Siguiendo el Manual de Fabricación de DARwIn-OP puse puntos de unión en los cortes finales de las piezas para que no se suelten. Después reemplacé el uso de una placa MDF de base por una de aluminio. Después probé fresar todo con sólo una fresa de 1.5mm, pero no me gustó el acabado y la calidad de los hoyos.
Ahora creo que tengo un mejor setup:
Siguiendo el setup de un amigo, reemplacé mi placa matriz de aluminio con una placa de MDF del mismo tamaño y sujeción.
Sujeto las planchas de aluminio con varios tornillos de 2.5mm x 10mm al rededor de la pieza a cortar. Para eso hago hoyos de 2mm x 9mm al MDF. Después de varios cortes, la placa de MDF puede ser reemplazada por otra.
Volví a usar una fresa de 2.5mm (o 2mm según la parte a cortar, aunque el manual de fabricación recomienda una fresa de 3mm, algunos diseños requieren cortes de radio 1mm).
Volví a usar brocas de 1,6mm, 2,0mm, 2,05mm, 2,5mm y 2,6mm. Pero como uso ‘fresa brocas’ de carburo, ya no estoy usando la broca centro para marcar las perforaciones. (Después de varias pruebas no noté corrimiento en los hoyos).
Broca
Ya no estoy dejando puntos de unión en los cortes finales. Ahora atornillo la pieza al MDF antes del corte final usando varios de los hoyos originales de la pieza.
Para espacios grandes que deban ser vaciados dentro de una pieza, freso completamente el espacio para que no se desprendan pedazos de aluminio que puedan romper la fresa. Si el espacio es muy grande, entonces también lo atornillo para fresar menos.
También reemplacé el cabezal de mi fresadora Sherline con un modelo ER-16 (también de Sherline). Esto permite cambios de herramientas más fáciles y hay pinzas de sujeción (o collets) disponibles como las Techniks con muy buena precisión lo que es importante para mantener fresas pequeñas bien centradas.
Actualicé mi fresadora a 10k RPM (con un set de Sherline).
Con la fresa de 2.5mm estoy cortando a 5k RPM, 200mm/s de avance y 0.4 de profundidad de corte. Con la fresa de 2mm cambio la profundidad de corte a 0.25mm.
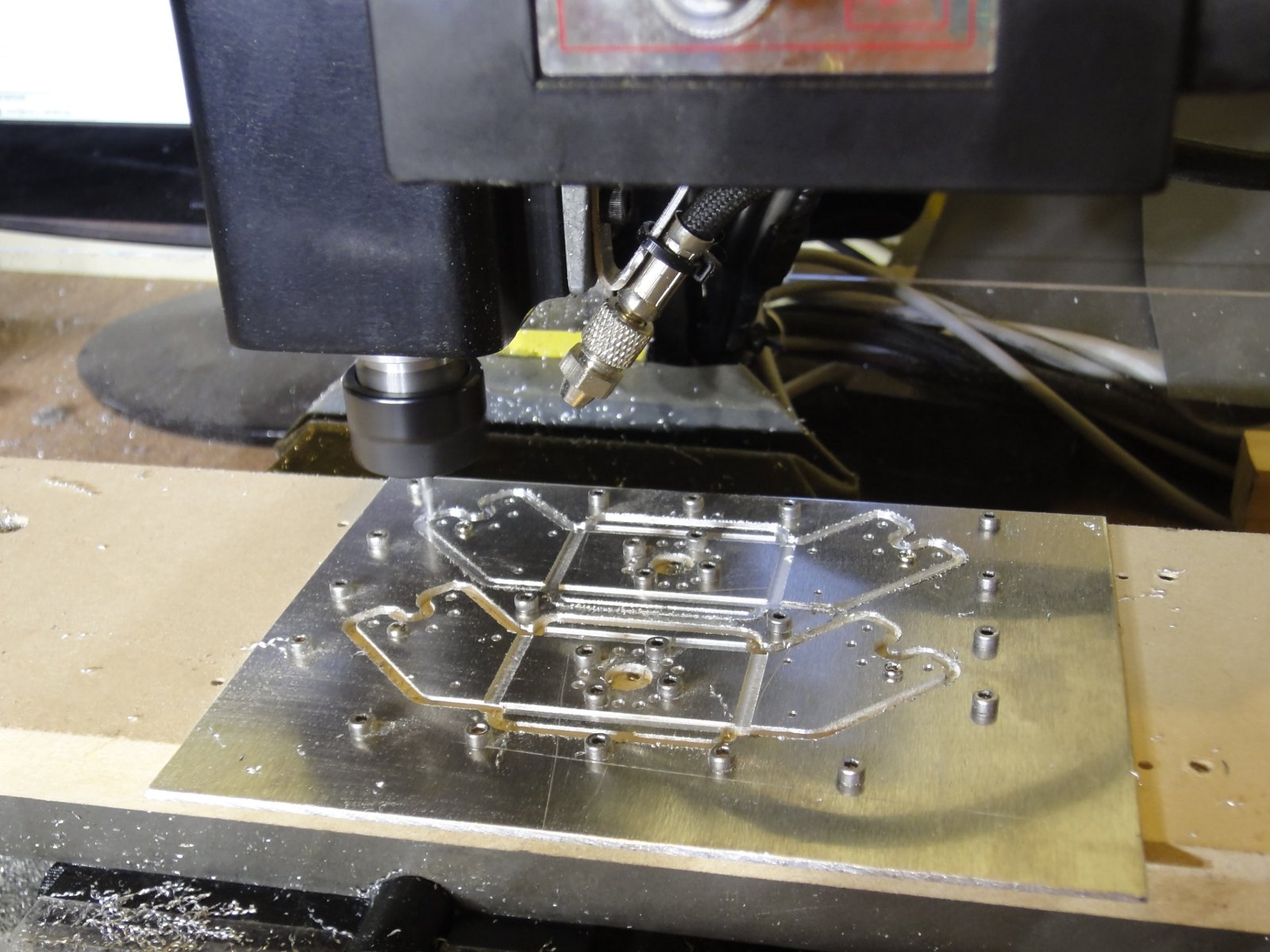
No uso lubricante, solamente un soplador de aire para mantener limpia el área de corte (ver foto).
La siguiente foto muestra el setup durante el último corte final:
Cortando los hombros del robot DARwIn-OP
Los archivos gcode más viejos que escribí no siguen estas reglas, pero no es difícil actualizarlos.
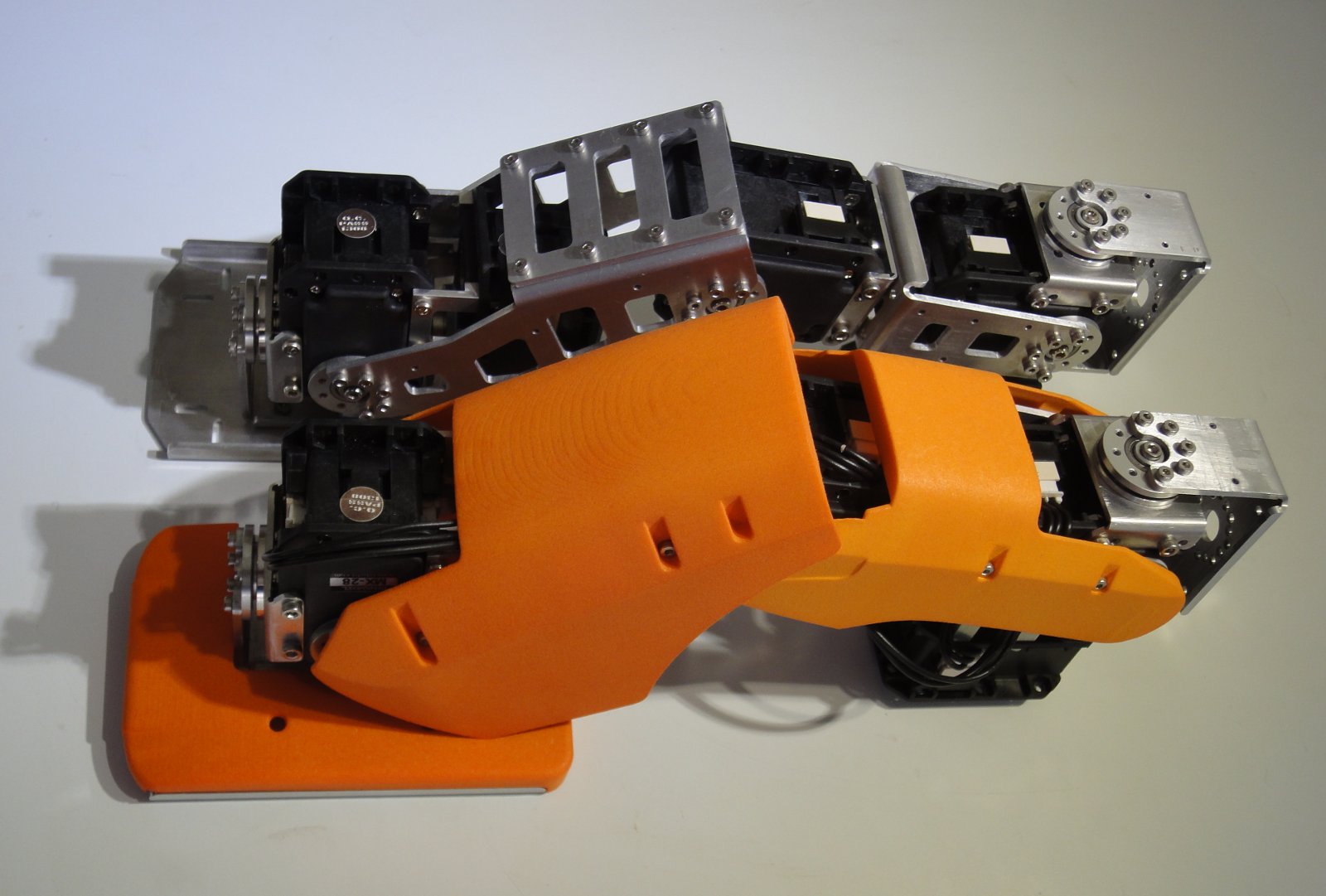
Mi clon de DARwIn-OP ya está tomando forma. Ya monté la sección del abdomen.
DARwIn-OP de los pies a los hombros.
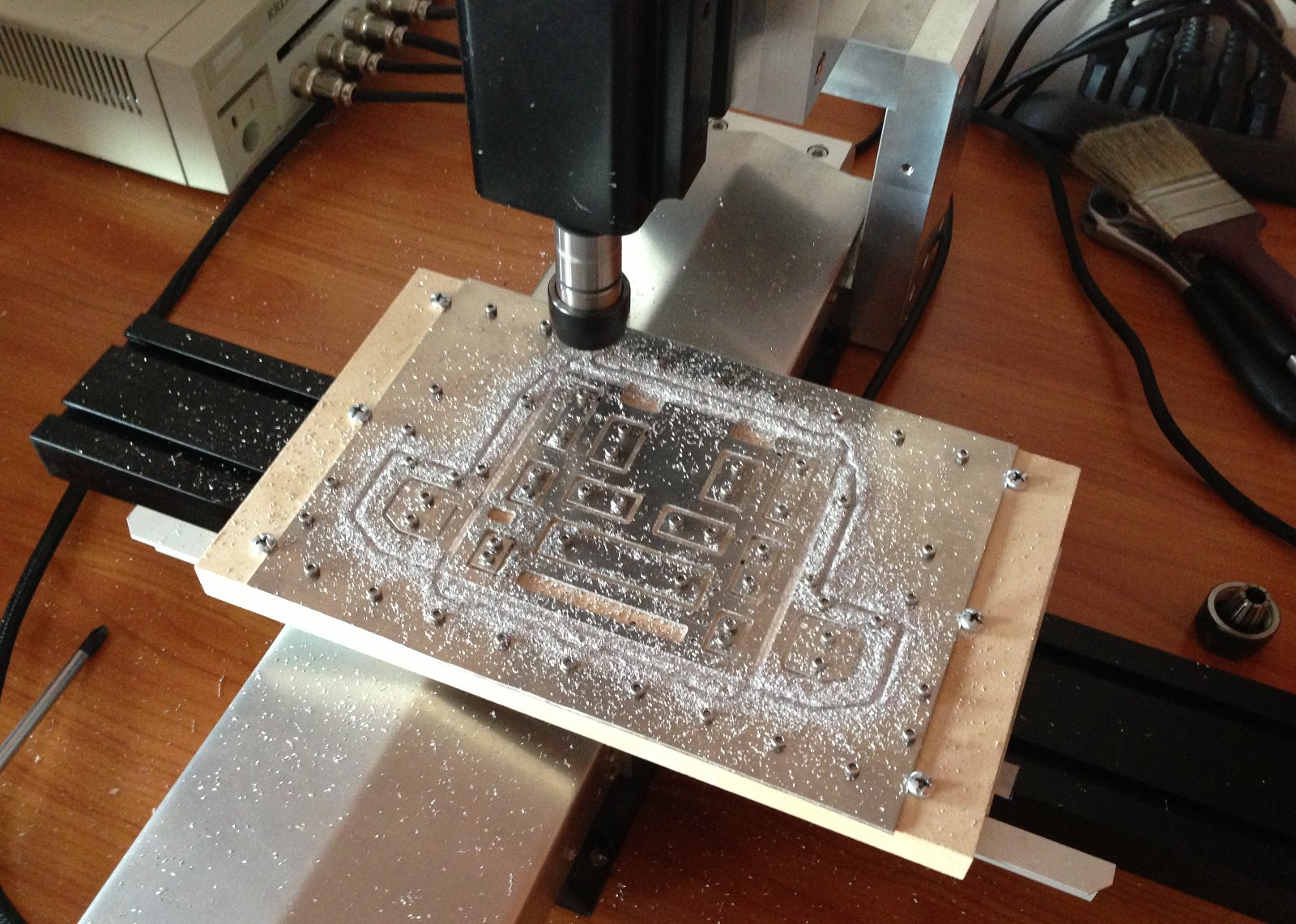
Las piezas del pecho donde va instalado el computador son bastante grandes y mi fresadora no tenía el rango necesario en el eje Y para fresarla de una sola vez. Por suerte un amigo que conocí vía este blog me ayudó con el corte, él tiene una fresadora Sherline que modificó y automatizó con mucho más rango en el eje Y, además es dealer de Sherline en Chile y trabaja en esto, tiene su propio blog con varios proyectos bien interesantes en metaltronics.wordpress.com.
Fresado en Sherline modificado.
Para estos cortes, probamos usar sólo una fresa de 1.5mm para todo el fresado, incluyendo perforaciones (1.6mm las más pequeñas). Para futuros cortes voy a utilizar fresas más grandes, de 2mm o 2.5mm como en los cortes anteriores, la fresa de 1.5mm requiere una profundidad de pasada muy baja (usamos 0.2mm) y son más frágiles.
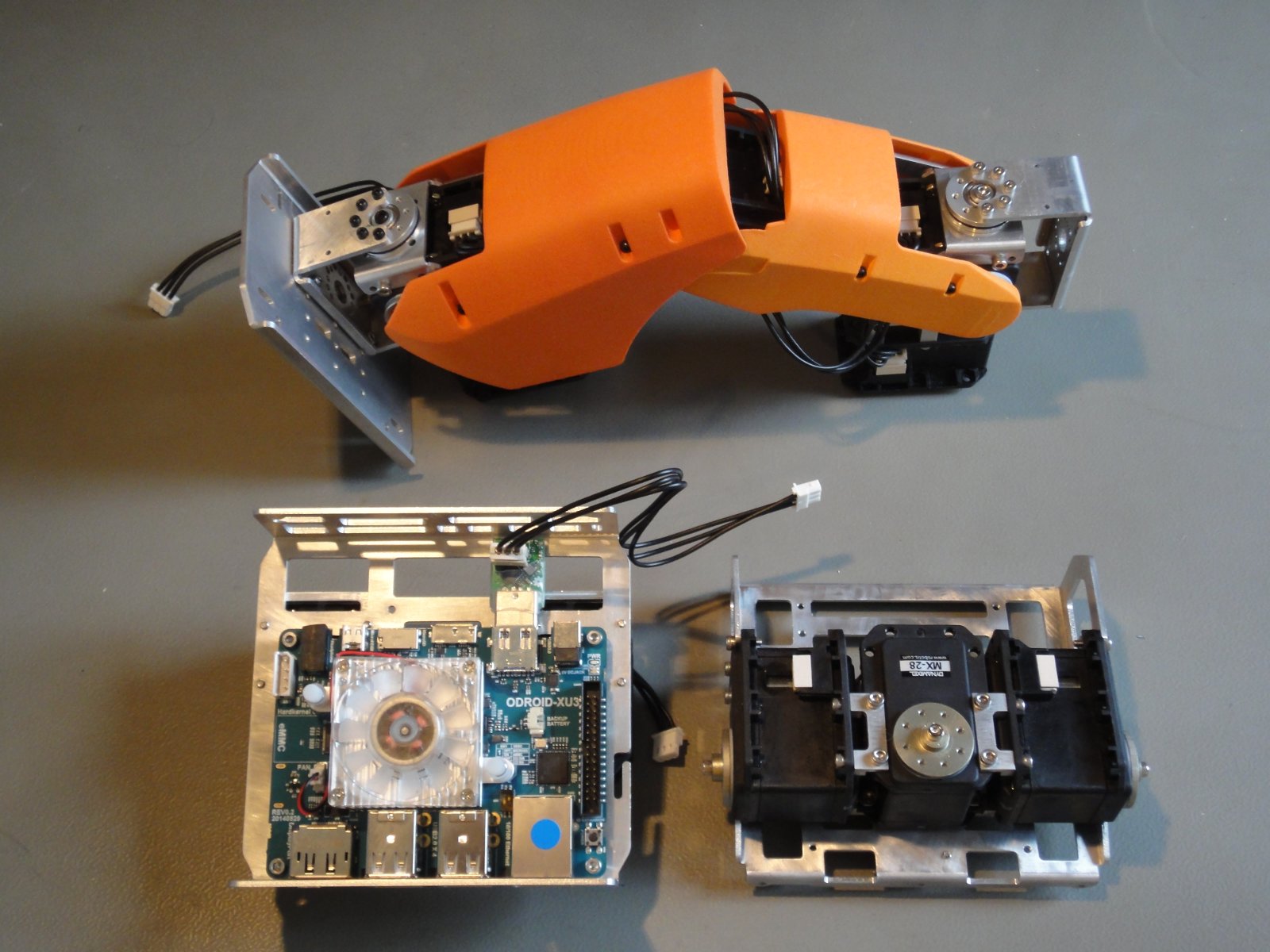
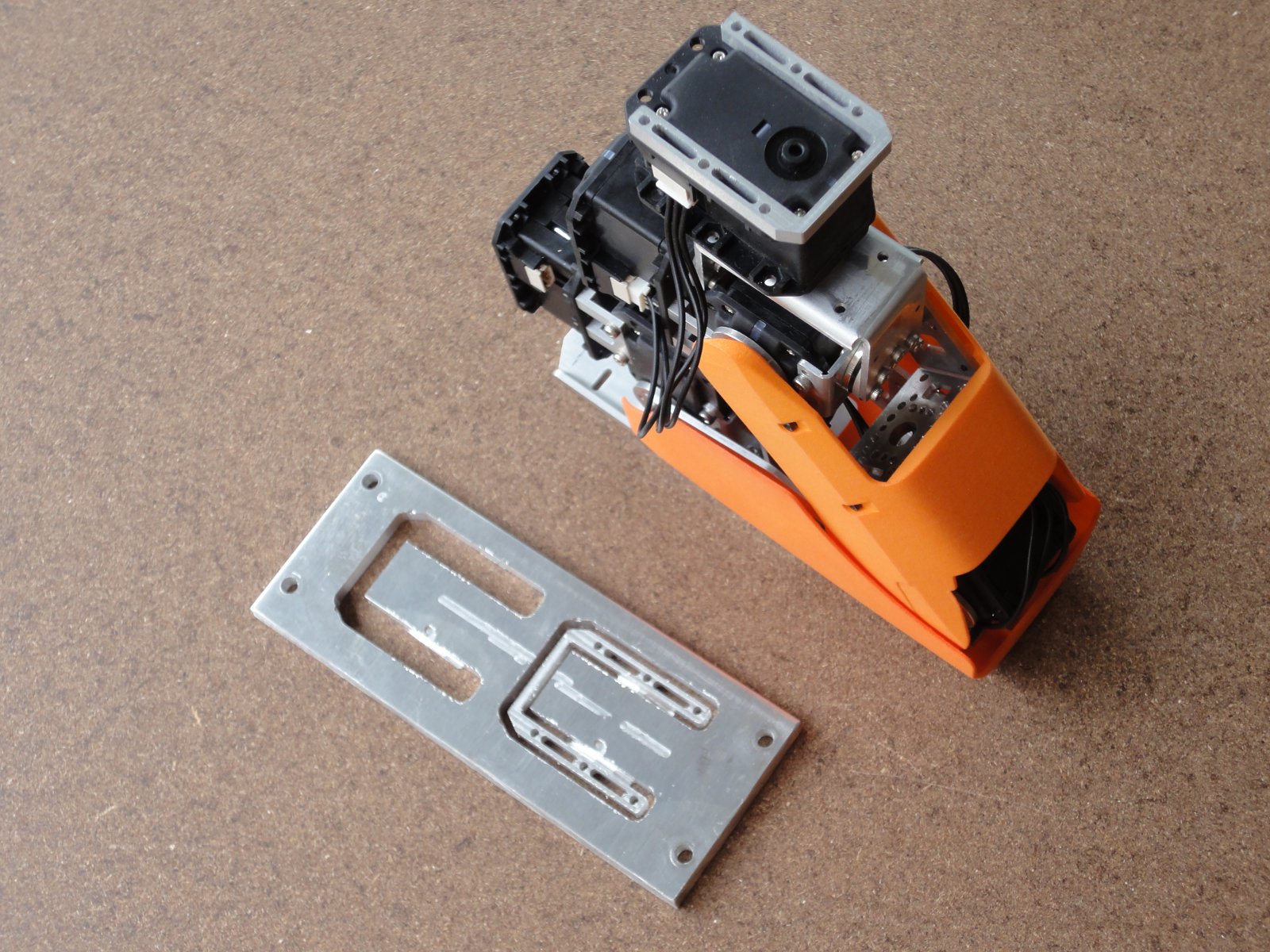
Como no voy a usar la electrónica original del DARwIn-OP (Fit-PC + controlador CM-730), las piezas del pecho las modifiqué para montar un computador Odroid-XU3, en particular para el acceso a puertos traseros y los puntos de fijación.
Partes del pecho con Odroid-XU3 (y USB2AX montado) y servos de hombros y cuello.
El Odroid-XU3 cabe sin problemas, para montar el USB2AX (interfaz a los servos) tuve que ajustar el conector TTL a posición vertical.
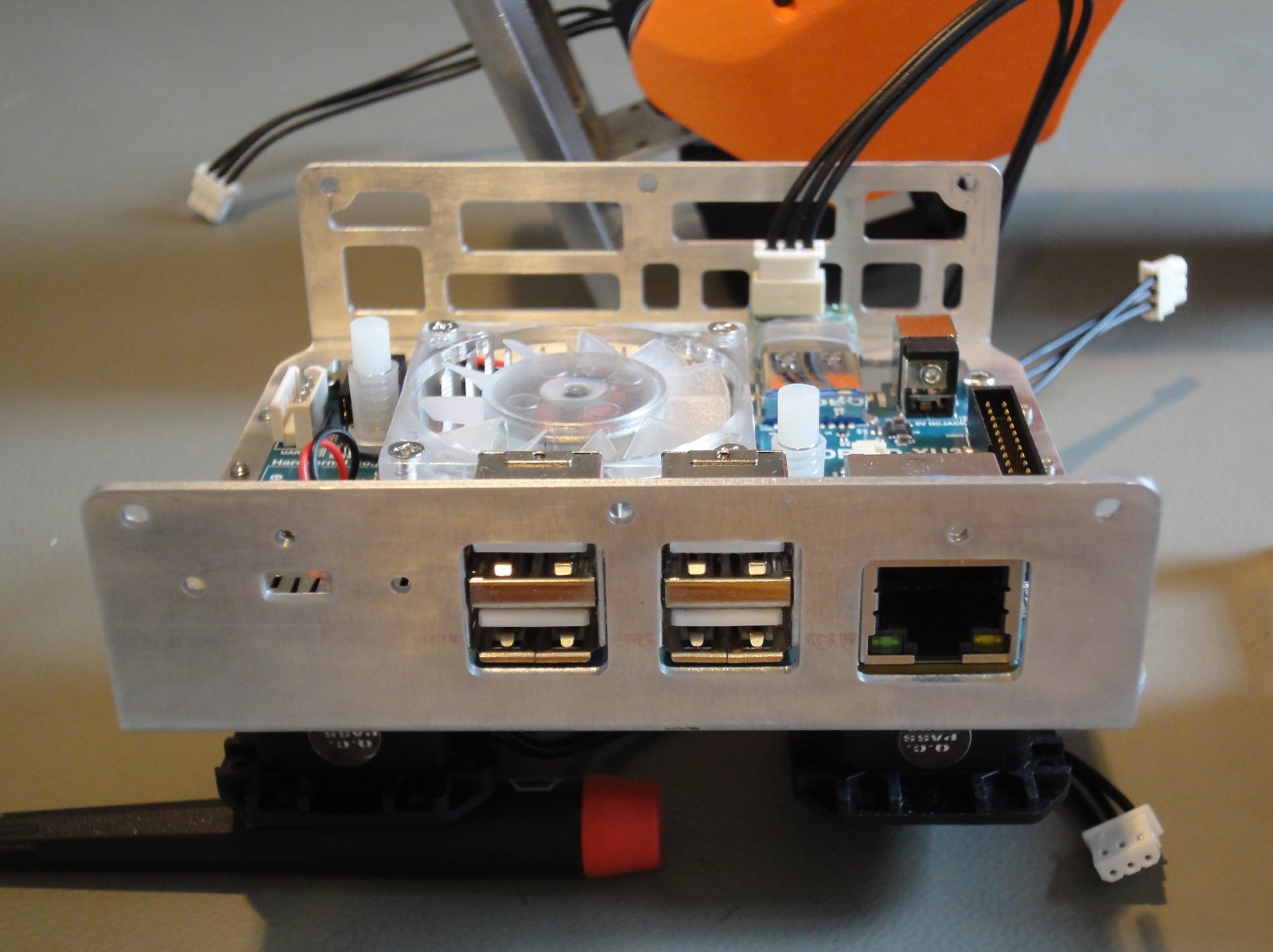
En la parte posterior, expuse el puerto Ethernet, 4 puertos USB 2.0 y espacio para un micro-HDMI (vía un extensor de 15cm). Probablemente termine dejando sólo 2 puertos USB expuestos, desoldando un conector para contar con más puertos USB internamente.
Puertos del Odroid-XU3 expuestos.
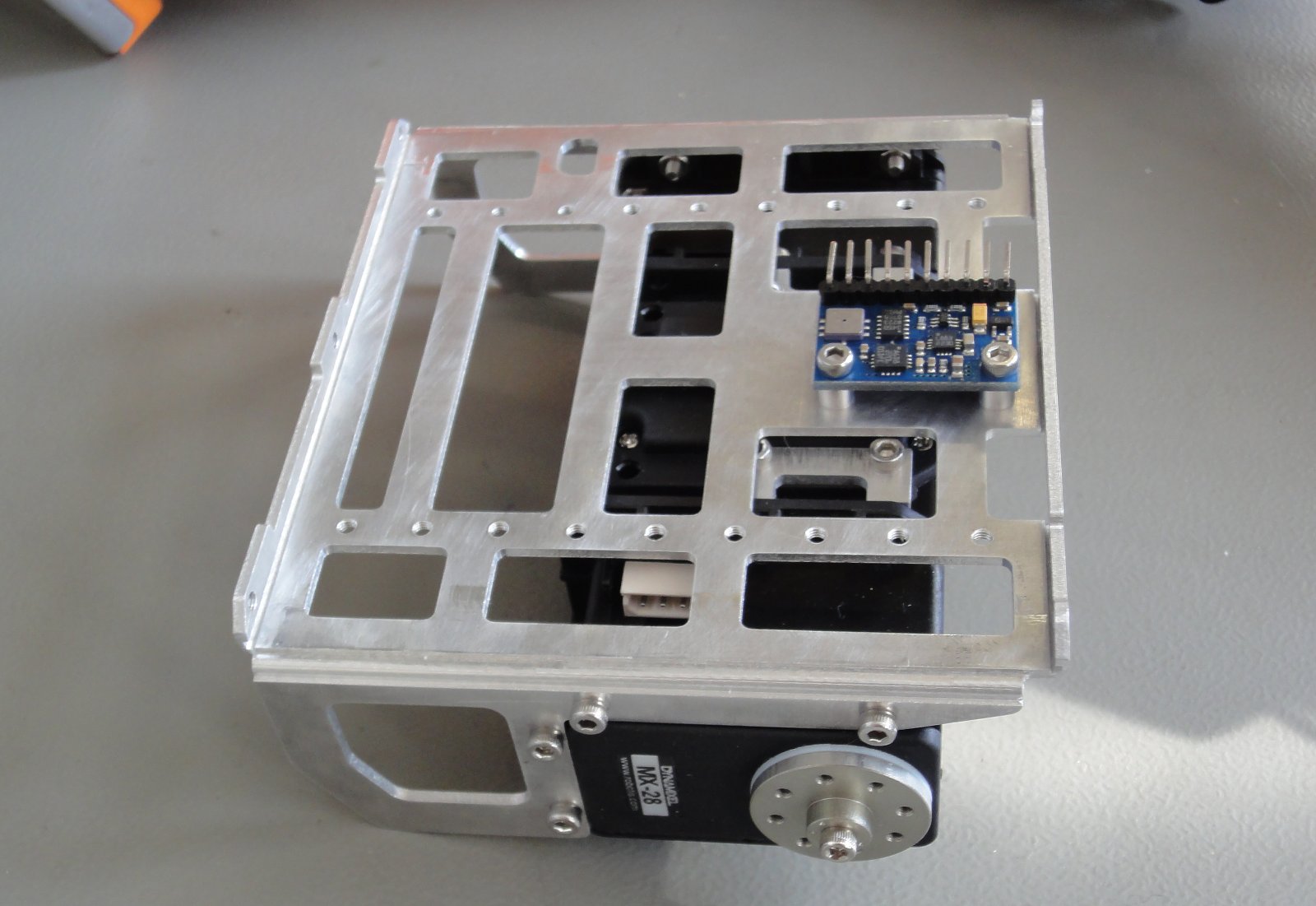
La pieza superior del pecho fue modificada para fijar el 10-DOF con el acelerómetro y giroscopio, centrando el chip del acelerómetro en la misma posición en la iría si hubiera usado el controlador original CM-730. Además dejé 2 líneas de perforaciones con hilo de 2.5mm para montar otros componentes de ser necesario.
10-DOF montado.
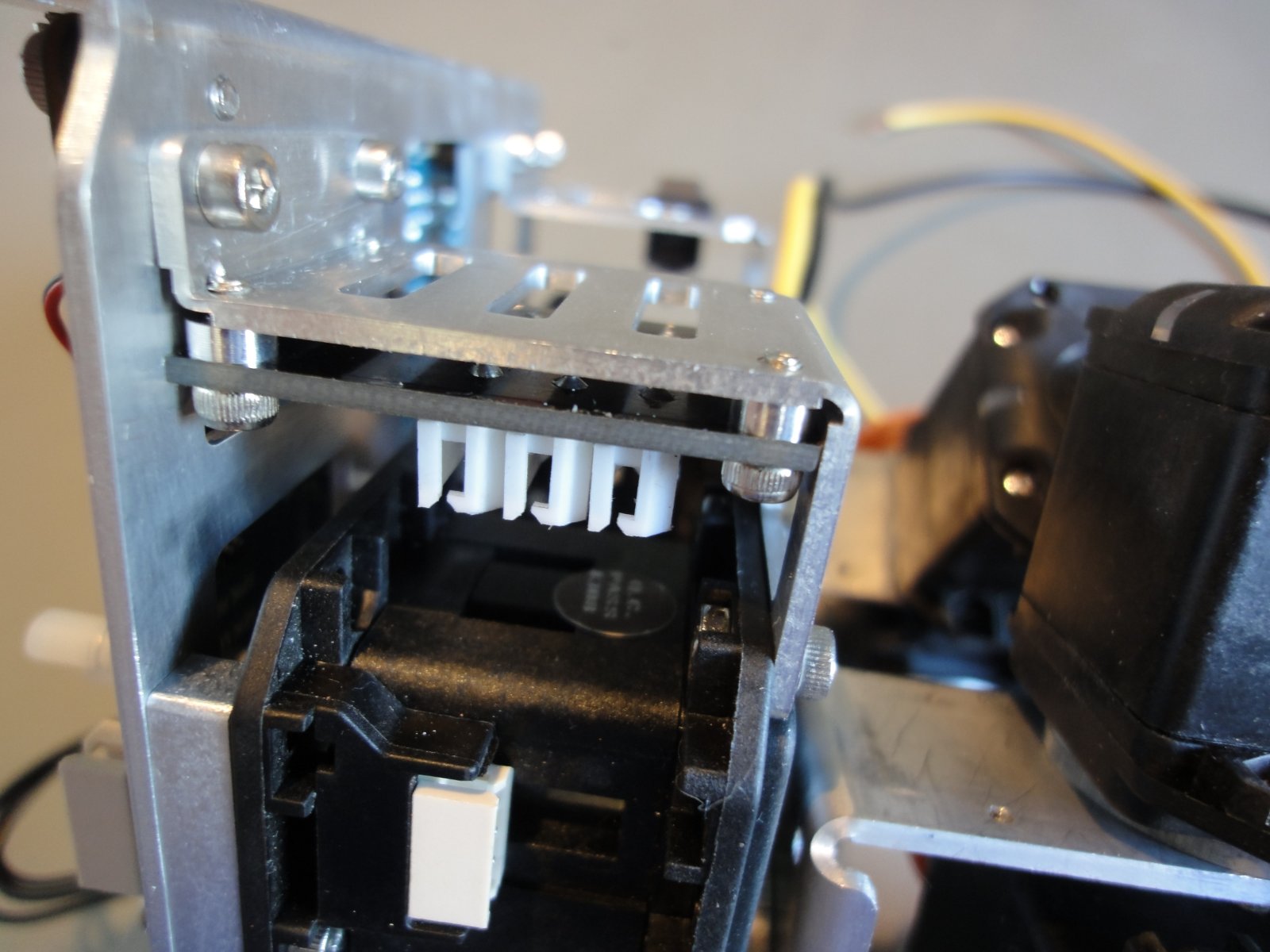
Debido al cambio de la electrónica que estoy haciendo, es necesario utilizar un hub TTL Dynamixel de 6 bocas para distribuir la comunicación y energía a los servos, en la parte posterior hay justo espacio para montarlo.
Fresé las piezas PR13_B_SPACER_PELV que son las piezas de montaje que van sobre las piernas.
Piezas de Montaje de Piernas
Estas piezas de montaje son necesarias para unir las piernas con la sección del pecho donde va el computador central. Actualmente estoy rediseñando las piezas del pecho para acomodar un computador Odroid-XU3, el cambio principal es en la posición de puertos USB y Ethernet expuestos al exterior.
Los archivos de corte de las piezas de montaje están en SourceForge aquí. En el archivo README están las lista de archivos gcode necesarios.
Para las futuras partes voy a tratar de cambiar la estrategia de fresado. En vez de usar varias brocas y fresas, voy a tratar de usar solo una fresa de 1.5mm para todos los cortes, y así evitar cambio de herramientas.
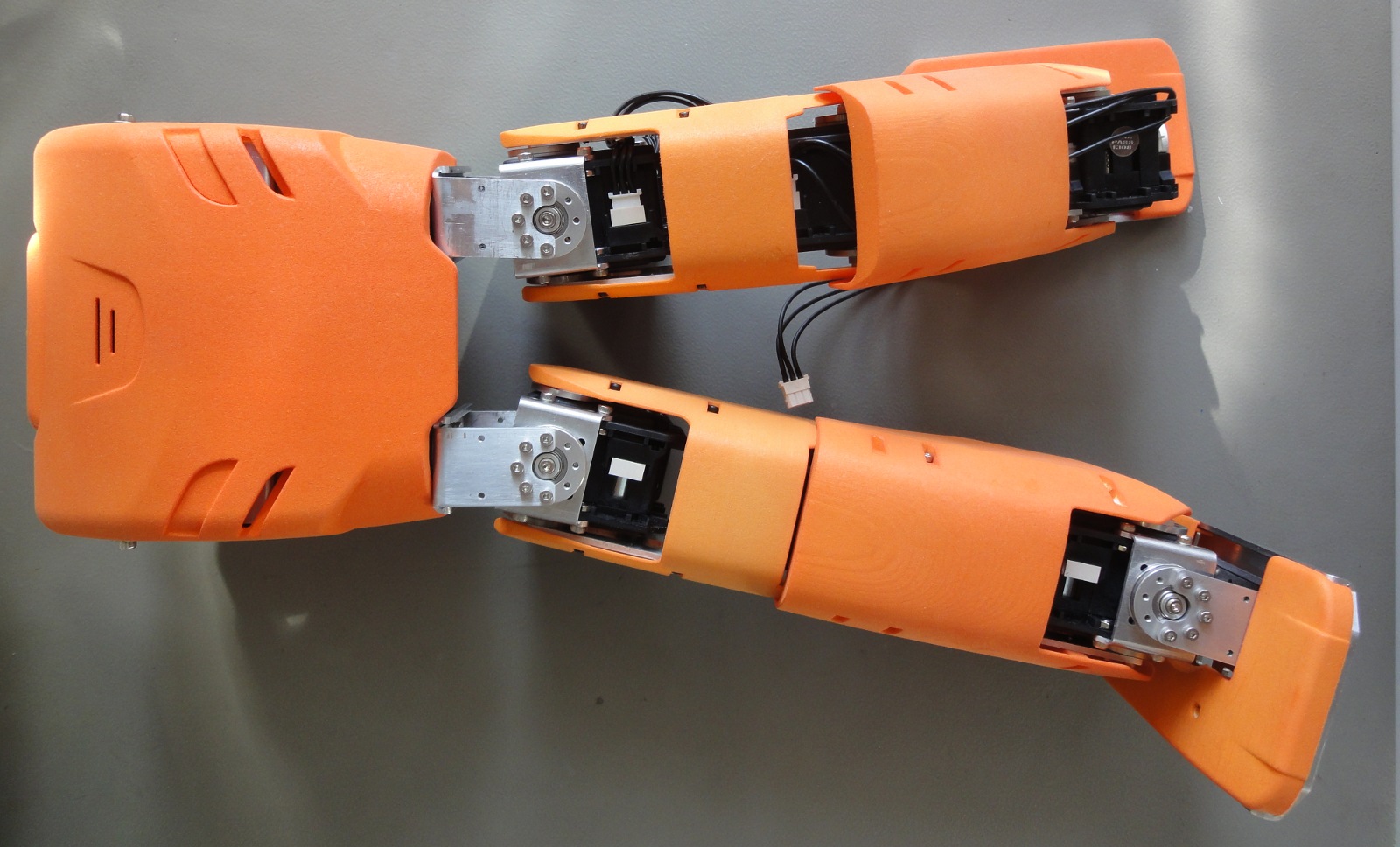
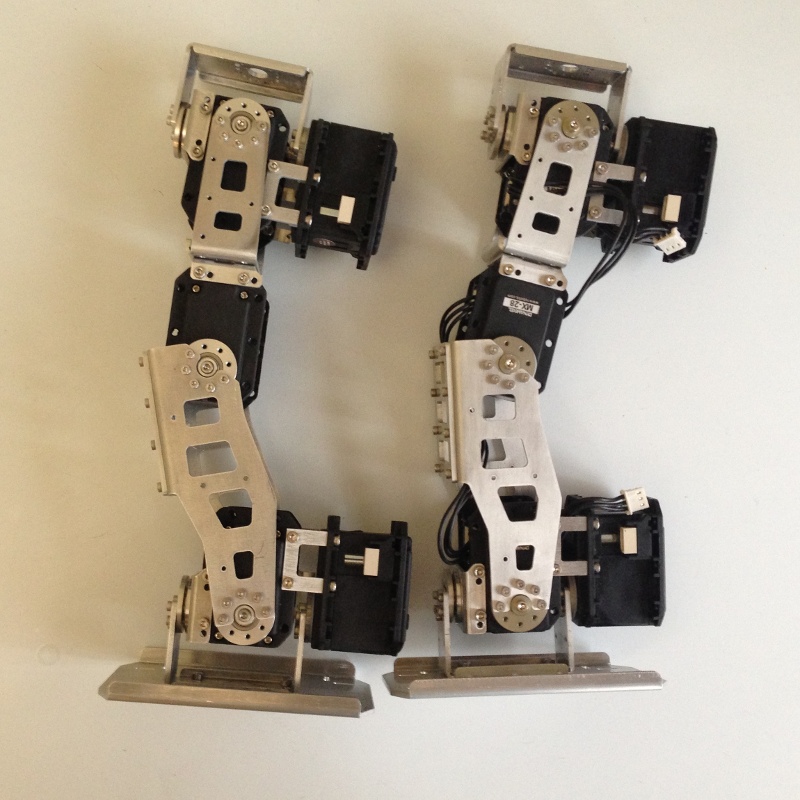
Terminé de ensamblar la segunda pierna de mi clon de DARwIn-OP.
2 piernas de DARwIn-OP
También terminé de escribir los archivos de corte gcode para las piezas de montaje pélvico (PR13_B_SPACER_PELV) que van entre las piernas y el pecho, las voy a cortar pronto.
Mientras tanto estaba rediseñando las piezas del pecho para acomodar el computador ARM ODROID-XU en vez del original FitPC con procesador Intel. Como alternativa también voy a permitir instalar un computador ODROID-U3 que es más pequeño y con menos capacidad de cómputo, pero también menos consumo. El último ODROID-U3 (Revisión 0.5) tiene una interfaz nativa SPI que podría servir para conectar sensores como el acelerómetro y giroscopio.
Pero ahora Hardkernel está por liberar el ODROID-XU3 en agosto y algo de información está disponible, las mayores diferencias con el ODROID-XU que encuentro interesantes para mi proyecto son:
Cores Cortex-A15 más rápidos (2GHz).
Octa-core de verdad con multi procesamiento heterogéneo.
Más eficiente.
Ya no tiene el conector LCD para obtener el bus I2C #1 nativo, pero ahora éste está disponible en el connector de expansión I/O que es de más fácil uso.
Incluye sensores de consumo.
Agrega entrada de audio (mono solamente).
OpenCL funciona en Linux.
Mismo tamaño que el ODROID-XU, así que es fácil de reemplazar.
De todas maneras, estoy viendo cómo cortar las piezas del pecho en mi Fresadora Sherline, que es muy pequeña para estas piezas, así qie las haré en partes.
Decidí hacer algunas pruebas de electrónica y software antes de terminar de fabricar la segunda pierna de mi clon del robot DARwIn-OP.
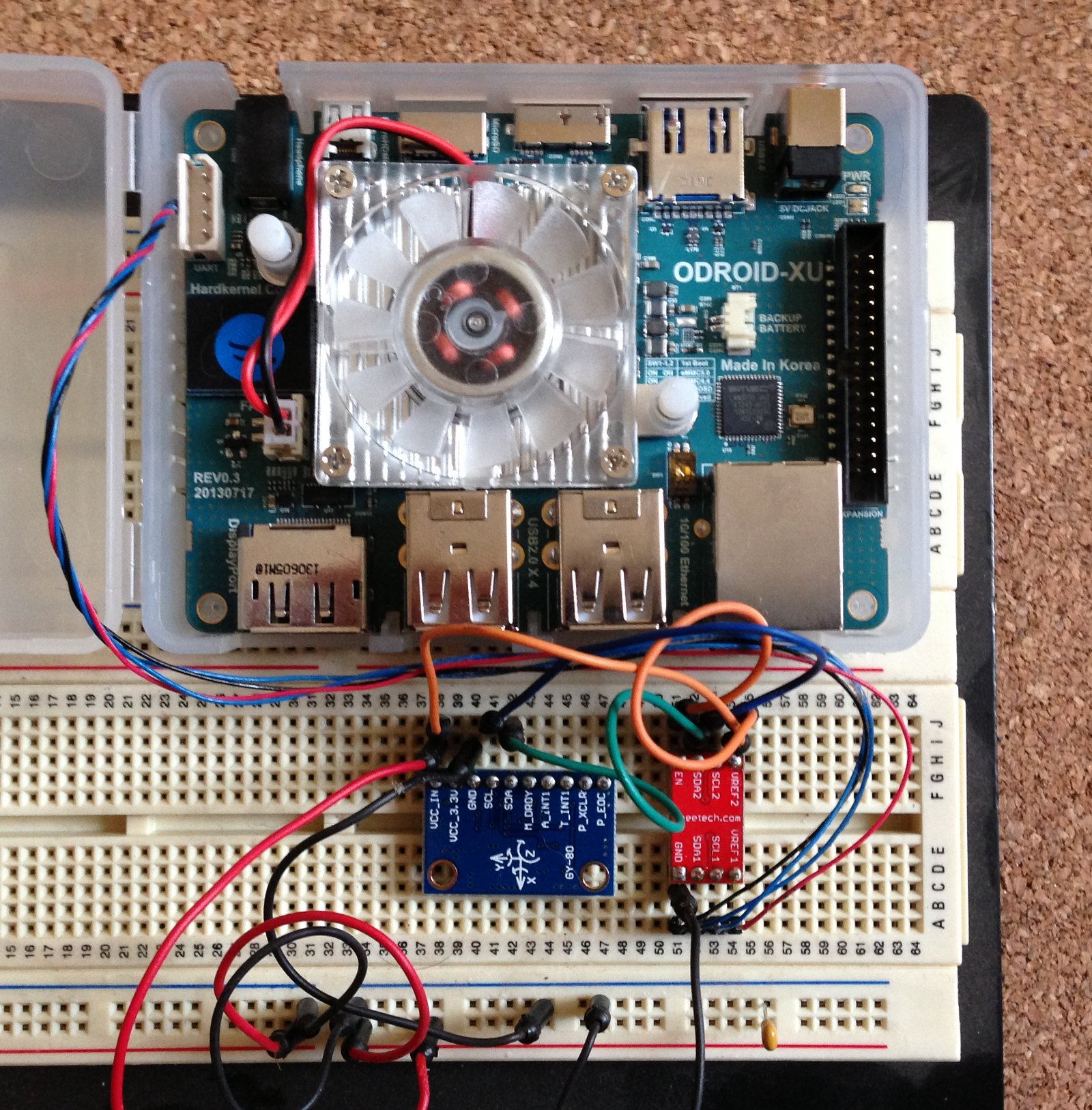
Conecté mi ODROID-XU con el módulo 10DOF GY-80 usando el bus I2C del conector LCD y un PCA9306 para ajustar voltages de la comunicación.
Setup de Prueba de I2C con ODROID-XU
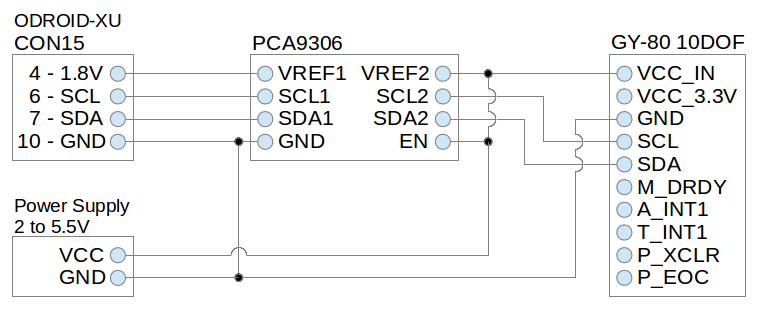
El siguiente es el diagrama de interconexión probado:
Diagrama de Prueba I2C
Este 10DOF puede energizarse desde 2V hasta 5.5V (VDD). Sus sensores están alimentados internamente a 3.3V, pero según esta documentación su interfáz I2C está ajustada a VDD, por lo que el PCA9306 tiene que traducir entre los 1.8V del ODROID-XU y VDD (y no 3.3V).
Este 10DOF tiene 4 dispositivos I2C con las siguientes direcciones:
0x1E: compás de 3 ejes (chip HMC5883L)
0x69: giroscopio de 3 ejes (chip L3G4200D)
0x53: acelerómetro de 3 ejes (chip ADXL345)
0x77: sensores de presión y temperatura (chip BMP085)
Con este pequeño programa, se puede consultar el chip del acelerómetro para detectarlo y verificar el setup. Actualmente estoy probando Ubuntu Server 14.04 de paquete en el ODROID-XU, el que incluye el compilador GCC por defecto.
Ahora que tengo la comunicación I2C funcionando, seguí la documentación de los chips y ejemplos en Internet para escribir un borrador de clases C++ para leer los sensores del 10DOF. Están disponibles en esta Sección de Código en el repositorio SourceForge para clonar el Robot DARwIn-OP.
Probé en forma exitosa el 10DOF energizándolo (junto al PCA9306) con 3.3V y 5V, pero a 3.3V consumen 0.024A (o 0.079W) y a 5V consumen 0.085A (o 0.425W). Así que en mi diseño final para el DARwIn-OP probablemente incluya un regulador de 3.3W para disminuir el consumo.
El robot original DARwIn-OP usa un computador Intel Atom Z530 de 1.6 GHz y un controlador ARM CM-730. Este controlador incluye un giroscopio de 3 ejes, un acelerómetro de 3 ejes y un bus Dynamixel para conectar los servos del robot.
Por mi parte, pretendo usar una electrónica alternativa basada en un computador ARM más poderoso (y barato). Para el computador principal, mi candidato es el ODROID-XU que es un quad Cortex-A15 1.6GHz con 2GB de RAM.
En vez del controlador, usaré un USB2AX para conectar los servos Dynamixel y varios componentes I2C para el giroscopio y acelerómetro.
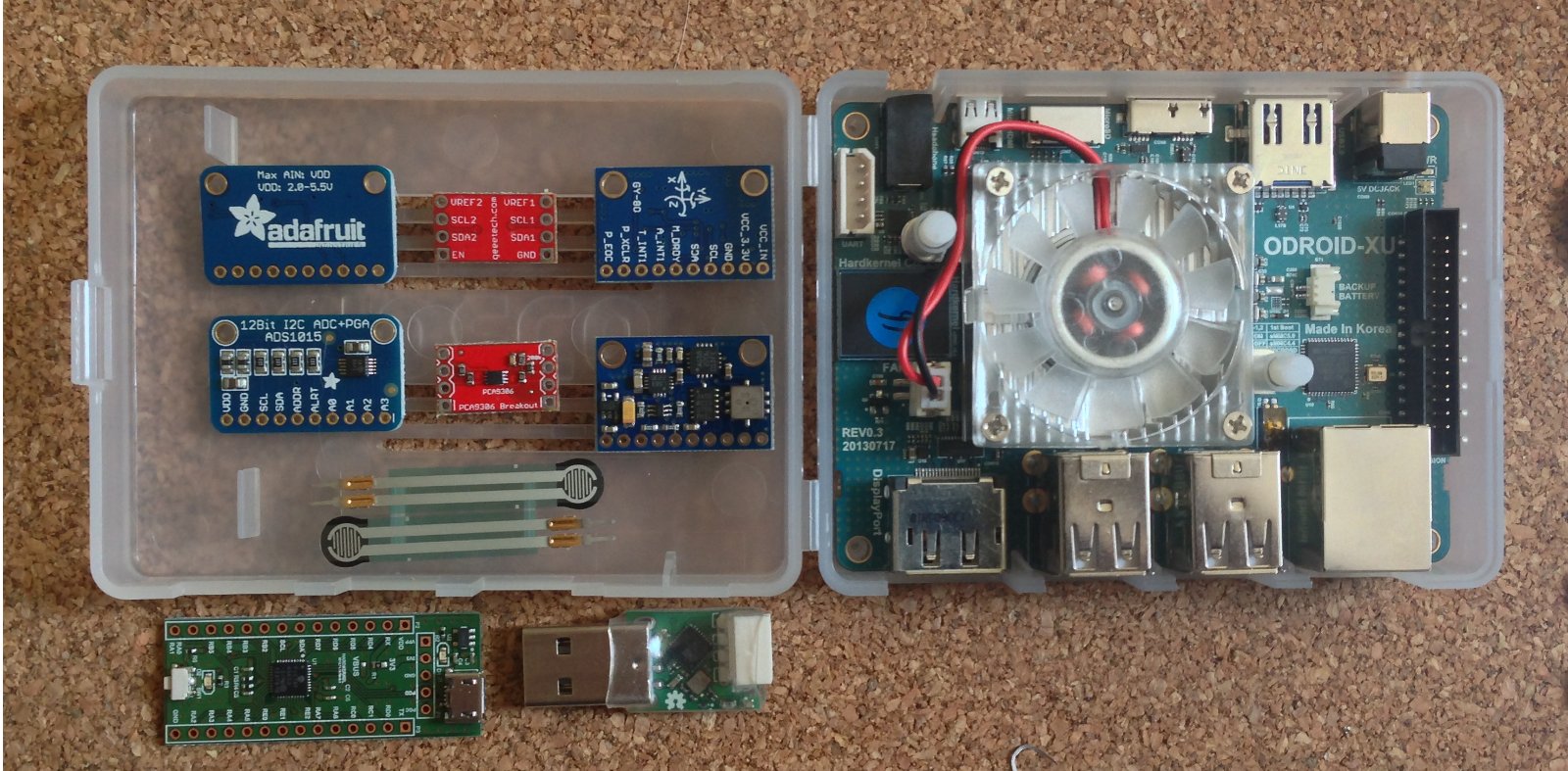
ODROID-XU y periféricos
En la imagen se muestran los componentes que ya tengo que estaré probando:
Conversor ADC I2C de 12 bit y 4 canales (chip ADS1015)
Traductor de voltaje I2C (chip PCA9306)
un multi componente I2C 10DOF con sensores de giroscopio de 3 ejes, acelerómetro de 3 ejes, compás de 3 ejes, temperaura y presión (chips, L3G4200D, ADXL345, HMC5883L, BMP085)
Usaré el bus I2C nativo I2C_0 que se encuentra en el conector LCD (CON15) en la parte inferior del ODROID-XU (el esquemático está disponible en Hardkernel vía petición por email).
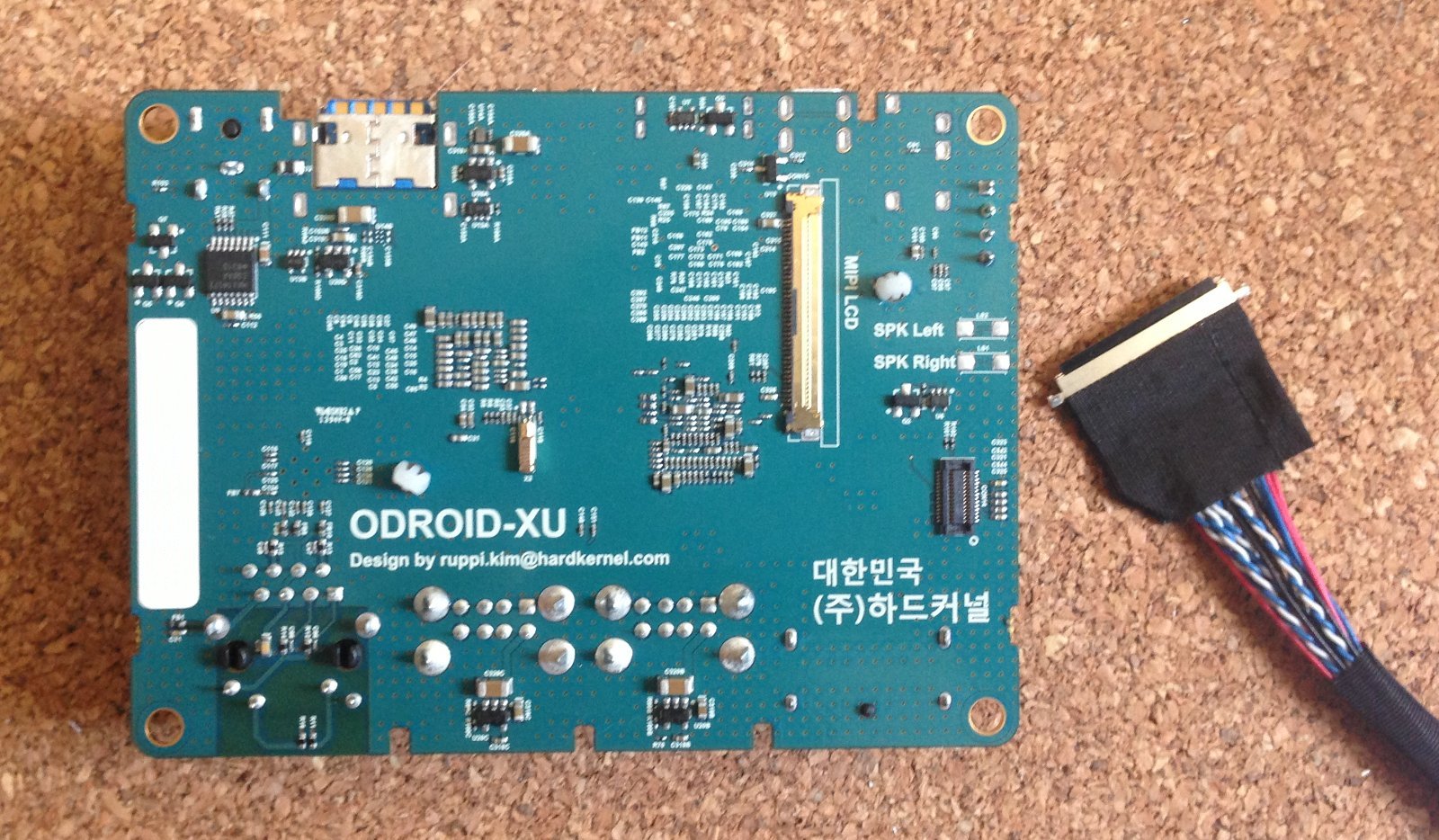
conector LCD del ODROID-XU y cable
El conector LCD es un IPEX de 40 pines de 0.5mm. Compré un par de cables en Ebay, aunque ahora noté que Hardkernel (el fabricante de ODROID) lo ofrece a la venta también. La configuración de pines que usaré para la interfaz I2C es:
4 – 1.8V
6 – SCL
7 – SDA
10 – GND
La interfaz I2C del ODROID-XU es de 1.8V, por lo que el PCA9306 servirá para interconectar el resto de los componentes I2C que son de mayor voltaje.
El DARwIn-OP requiere un giroscopio y acelerómetro, pero me interesa usar el compás y los sensores de fuerza (vía los conversores AD) para una futura versión de los pies del DARwIn-OP.