
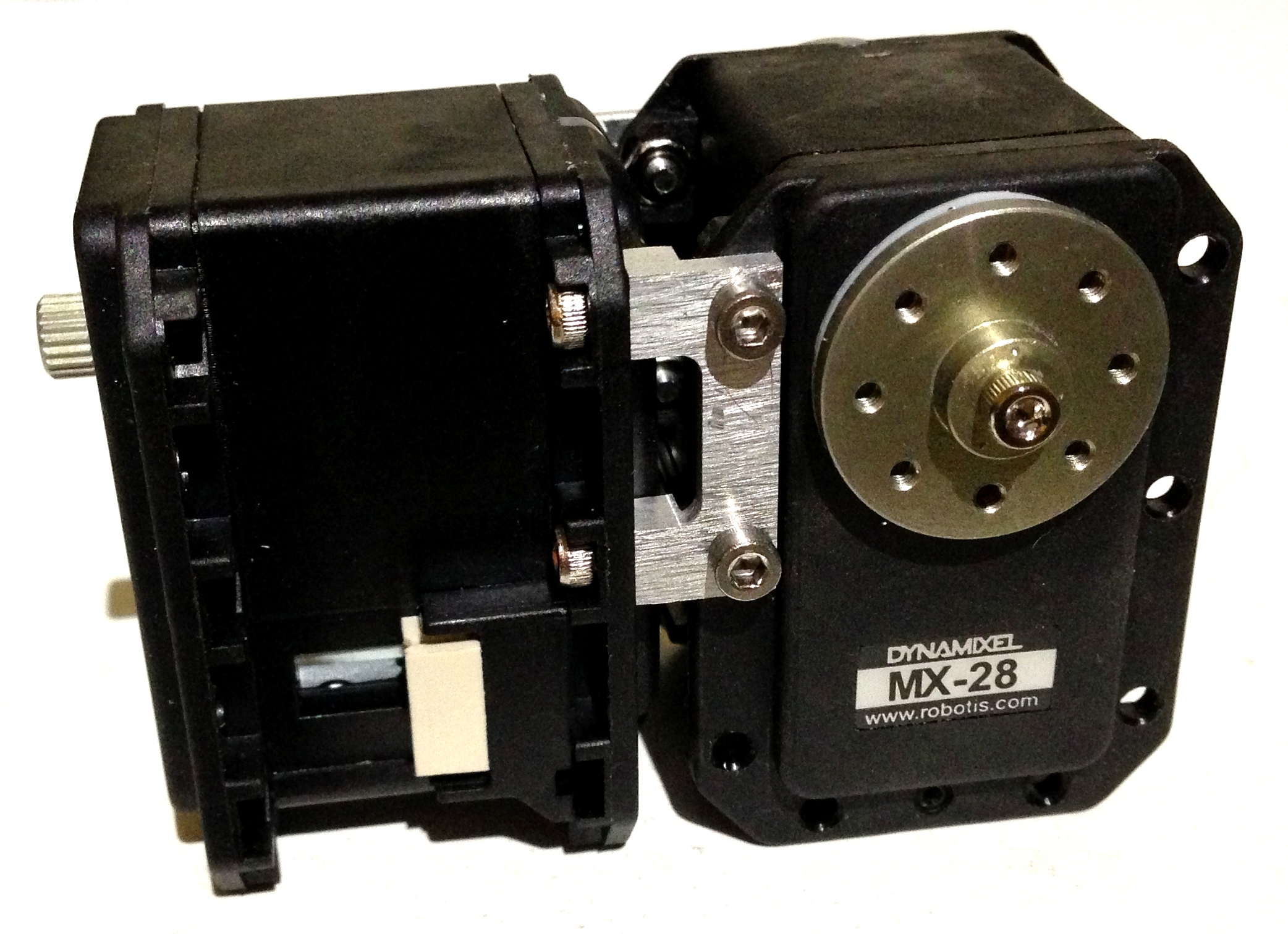
Ahora que revisé que los servos Dynamixel MX-28T funcionan y que es fácil desarrollar con el SDK, voy a continuar con el resto de la primera pierna de mi clón de DARwIn-OP.
Las piezas FR07_X101 y FR07_X102 son conectores de actuadores, ensamblan 2 servos para formar una articulación con 2 grados de libertad. El DARwIn-OP requiere 4 FR07_X101 y 8 FR07_X102. Según los archivos de modelo and el PDF de especificación de Robotis, son de 4,8mm de alto. Yo usé una plancha de 1/4″ como recomienda el Manual de Fabricación, pero una plancha de 5mm sería mejor (requiere fresar menos material).

En este corte comencé a utilizar una plancha de aluminio como base. También usé filas de pernos de 2,5mm para sujetar mejor el trabajo. Esto no es necesario para sujetar una plancha de 1/4″, pero las planchas de 1,5mm y 2mm se doblan fácil y espacios muy ajustados entre piezas o en los bordes puede distorsionar los cortes.
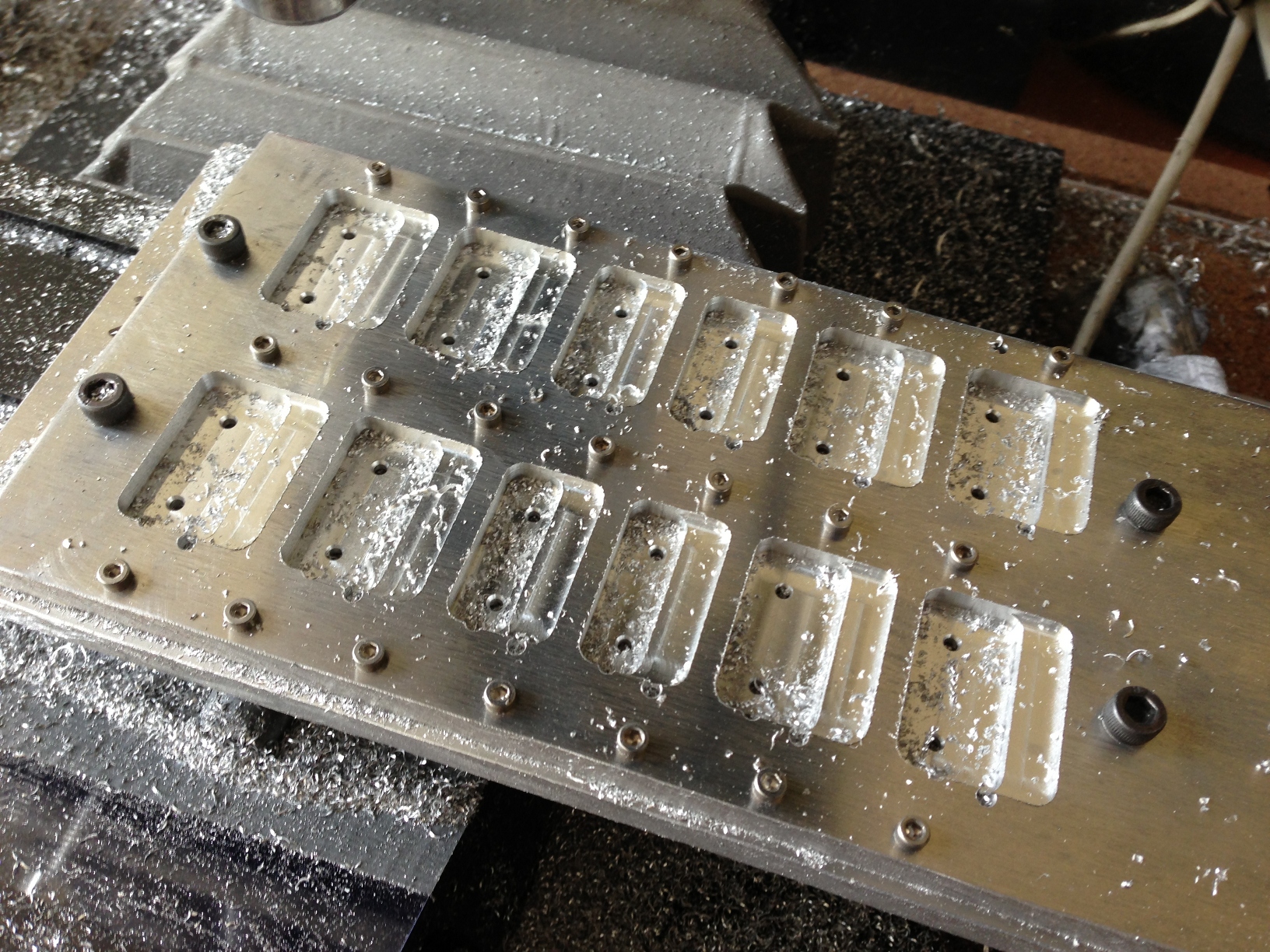
También comencé a precortar la base de aluminio en los lugares donde penetraría las brocas o la fresa, de forma que al cortar una pieza, las brocas o fresa no toquen la base de aluminio. Así evito que se acumule material entre la base y la plancha que se está cortando, de forma que ésta no se doble hacia arriba, lo que no sería bueno en cortes sensibles como los rebajes de 0,5mm en piezas de 2mm o de 0,75mm en piezas de 1,5mm.
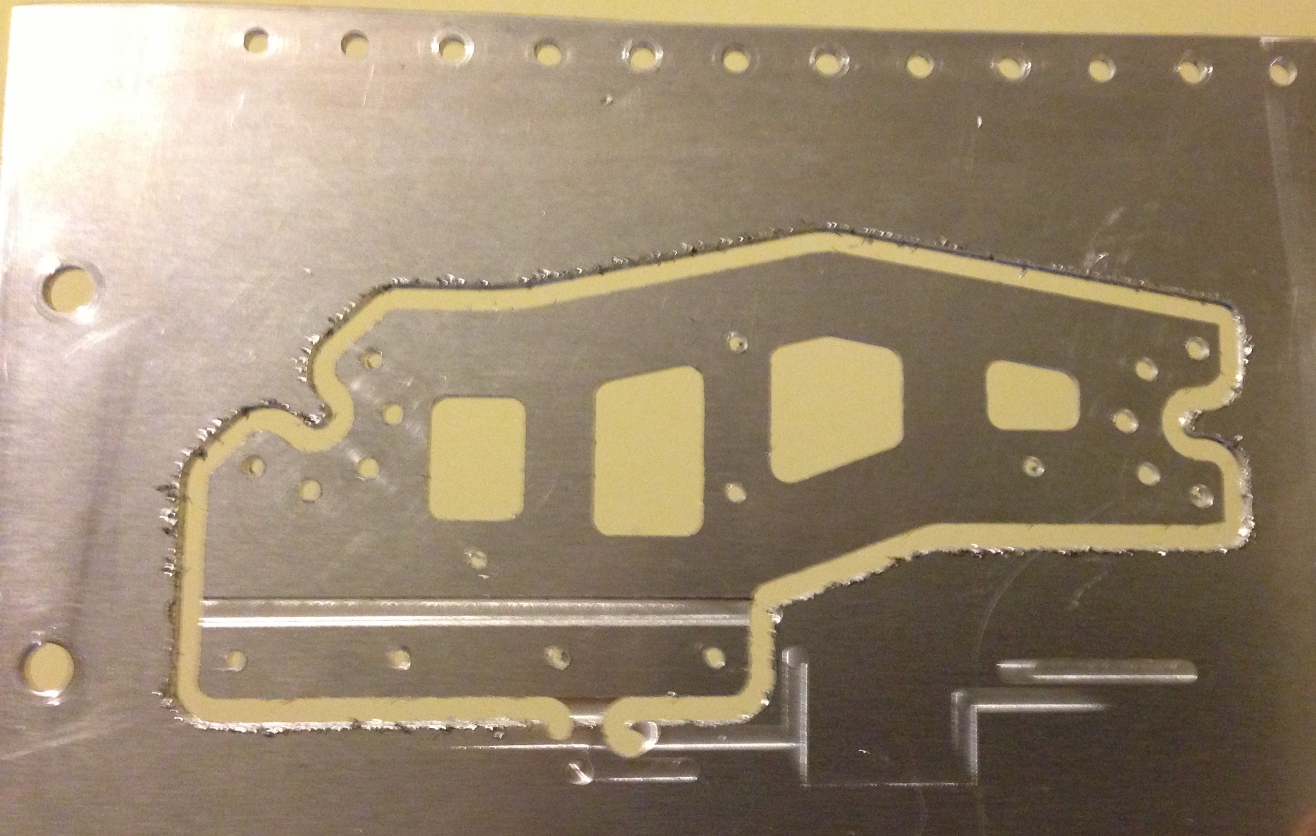
La pierna FR07_H133 es la pieza más bonita del robot DARwIn-OP. La corté en 3 partes como explico en esto blog previo.
Ahora puedo empezar a probar el ensamblado de mi clon de DARwIn-OP, las piezas todavía no están pulidas ni anodizadas por lo que se rayan fácilmente, pero es un paso importante para ver si las cosas se ven bien y calzan correctamente.
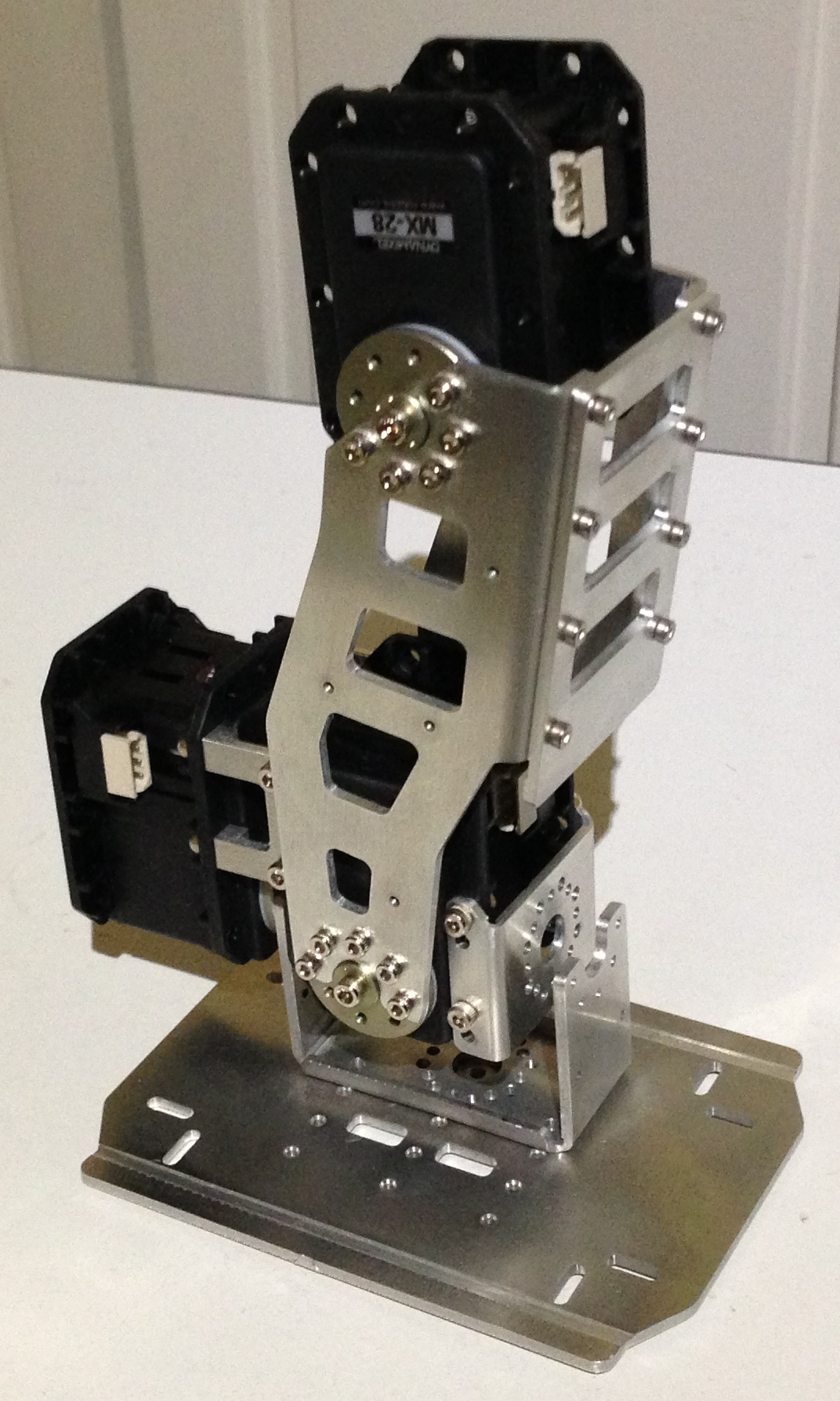
La pierna se ve muy bien, todavía me faltan algunos dobleces y unas piezas que se hacen en torno.
Como no pude usar los archivos de modelos 2D ya que generaban piezas de tamaño incorrecto, tuve que recodificar los G-code de corte basándome en los modelos 3D (Ver este post al respecto), así que voy a ver si tengo alguna respuesta sobre el tema en las discusiones SourceForge sobre DARwIn-OP antes de publicar los archivos G-code para las piezas que llevo (también tengo que limpiar un poco los archivos).