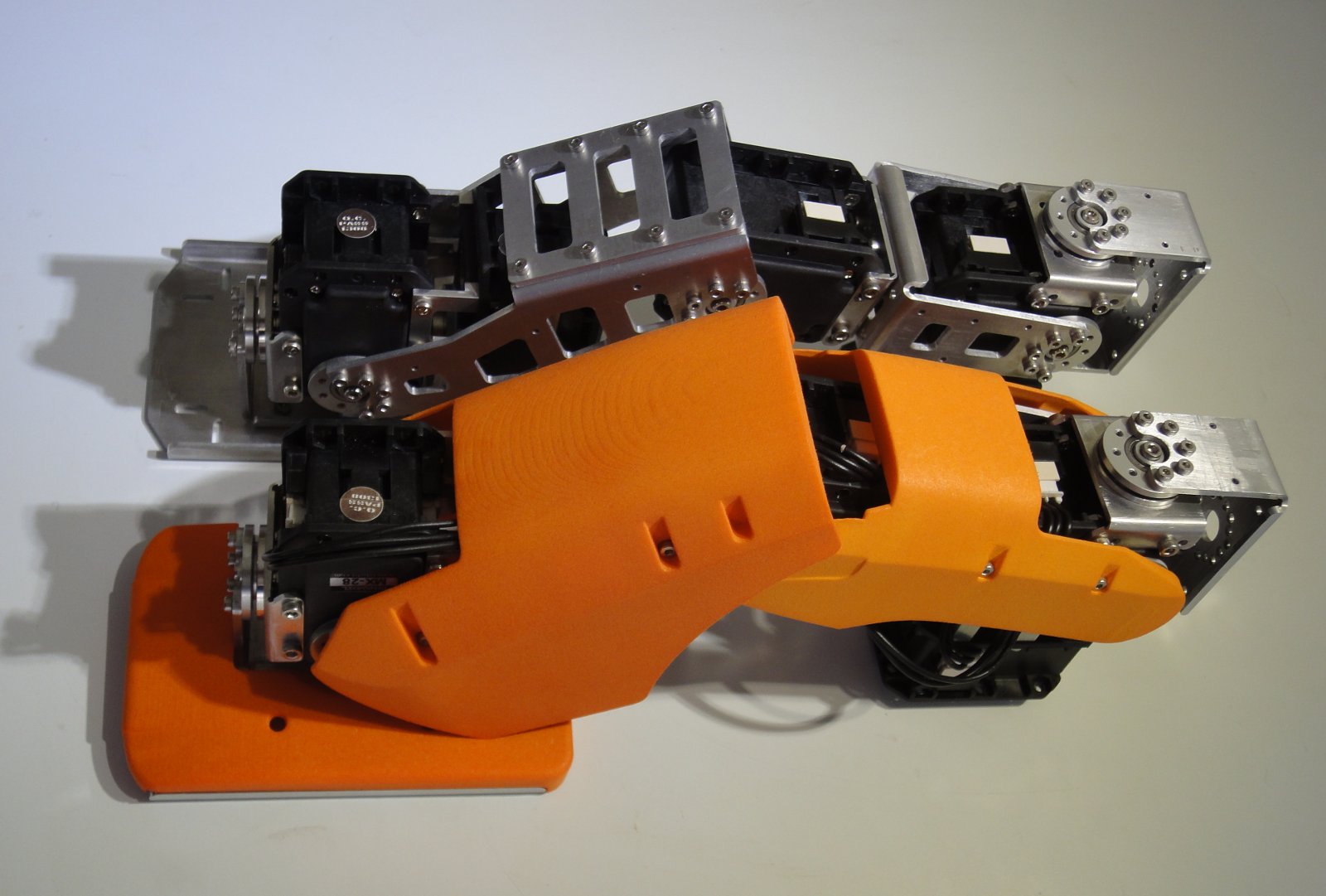
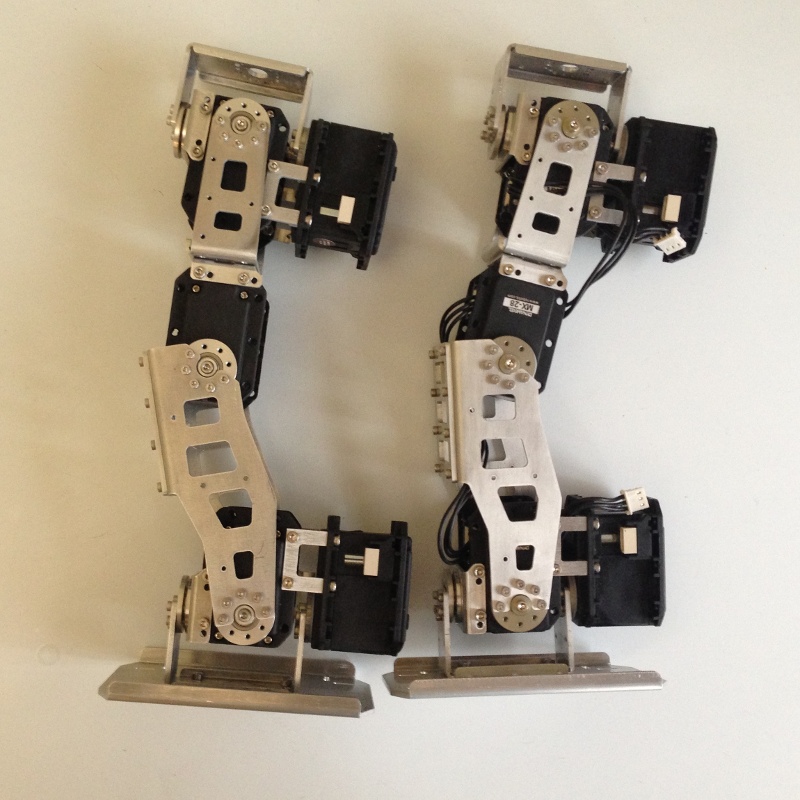
Terminé de ensamblar la segunda pierna de mi clon de DARwIn-OP.
2 piernas de DARwIn-OP
También terminé de escribir los archivos de corte gcode para las piezas de montaje pélvico (PR13_B_SPACER_PELV) que van entre las piernas y el pecho, las voy a cortar pronto.
Mientras tanto estaba rediseñando las piezas del pecho para acomodar el computador ARM ODROID-XU en vez del original FitPC con procesador Intel. Como alternativa también voy a permitir instalar un computador ODROID-U3 que es más pequeño y con menos capacidad de cómputo, pero también menos consumo. El último ODROID-U3 (Revisión 0.5) tiene una interfaz nativa SPI que podría servir para conectar sensores como el acelerómetro y giroscopio.
Pero ahora Hardkernel está por liberar el ODROID-XU3 en agosto y algo de información está disponible, las mayores diferencias con el ODROID-XU que encuentro interesantes para mi proyecto son:
Cores Cortex-A15 más rápidos (2GHz).
Octa-core de verdad con multi procesamiento heterogéneo.
Más eficiente.
Ya no tiene el conector LCD para obtener el bus I2C #1 nativo, pero ahora éste está disponible en el connector de expansión I/O que es de más fácil uso.
Incluye sensores de consumo.
Agrega entrada de audio (mono solamente).
OpenCL funciona en Linux.
Mismo tamaño que el ODROID-XU, así que es fácil de reemplazar.
De todas maneras, estoy viendo cómo cortar las piezas del pecho en mi Fresadora Sherline, que es muy pequeña para estas piezas, así qie las haré en partes.
I finished assembling the second leg for my DARwIn-OP clone.
2 DARwIn-OP legs
I finished writing the gcode cut files for the pelvic mounting brackets (PR13_B_SPACER_PELV) which go between the legs and the chest, and I’ll be cutting them soon.
Meanwhile I was redesigning the chest brackets to accommodate the ODROID-XU ARM computer instead of the original FitPC with an Intel processor. As an alternative, I am also considering to use an ODROID-U3 computer, with has a smaller footprint and a less powerful ARM processor (and consuming less power). The latest ODROID-U3 (Revision 0.5) has an native SPI interface, so which could be used to interface sensors (accelerometer and gyroscope).
But now, Hardkernel is going to release the ODROID-XU3 in August and some info is available. The main differences with the ODROID-XU that I find interesting for my project are:
Faster Cortex-A15 cores (2GHz).
Full octa-core Heterogeneous Multi Processor system.
More energy efficient.
No more LCD connector to get the native I2C #1 bus, but it is available now in the easier to access I/O expansion connector.
Included energy sensors.
Audio-In added (mono only).
OpenCL working in Linux.
Same form factor as the ODROID-XU, so easy replacement.
Anyway, I am scratching my head on how to cut the chest brackets on my Sherline mill, which is too small for these brackets, so I’ll be making them in parts.