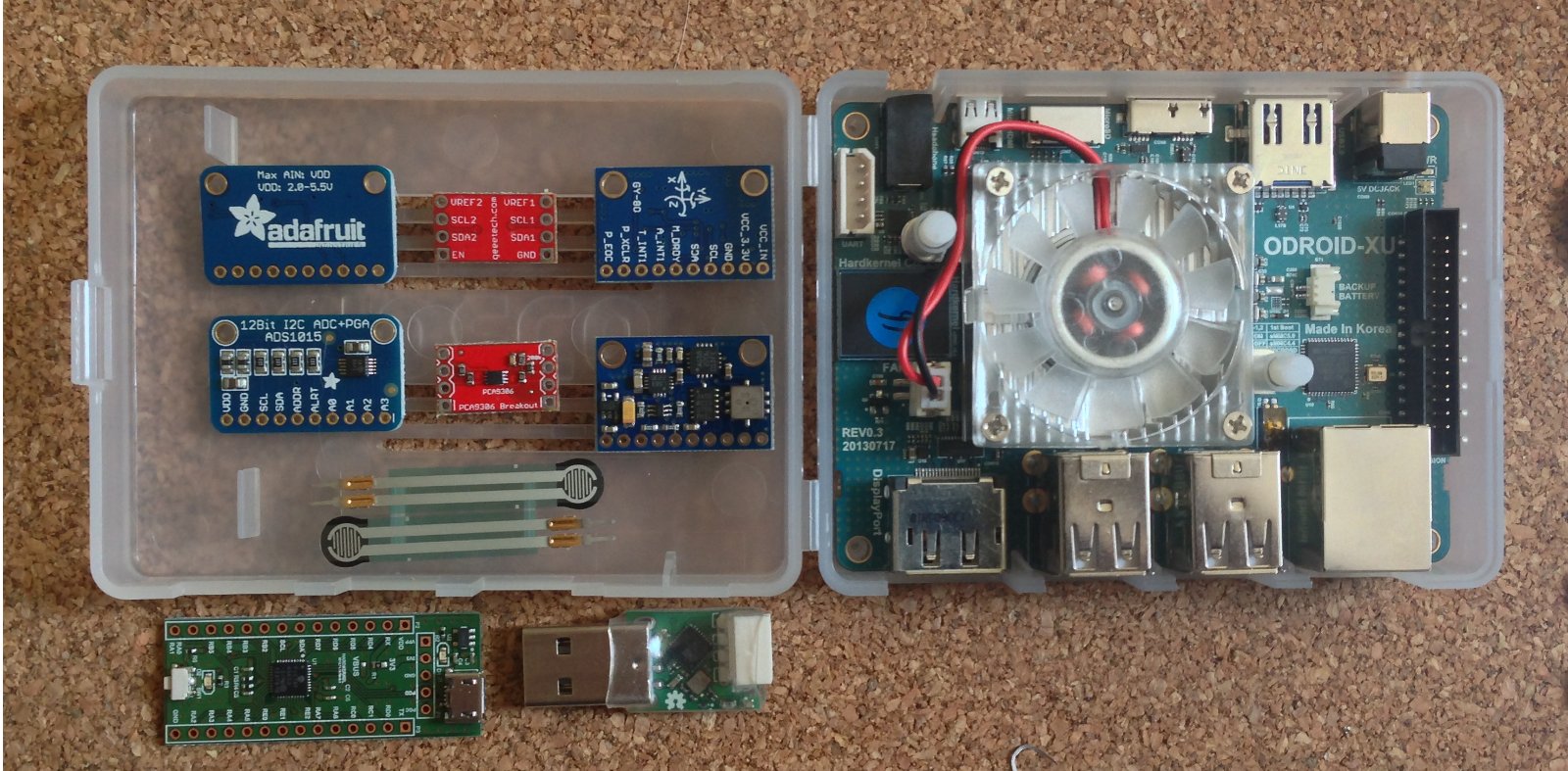
Decidí hacer algunas pruebas de electrónica y software antes de terminar de fabricar la segunda pierna de mi clon del robot DARwIn-OP.
Conecté mi ODROID-XU con el módulo 10DOF GY-80 usando el bus I2C del conector LCD y un PCA9306 para ajustar voltages de la comunicación.
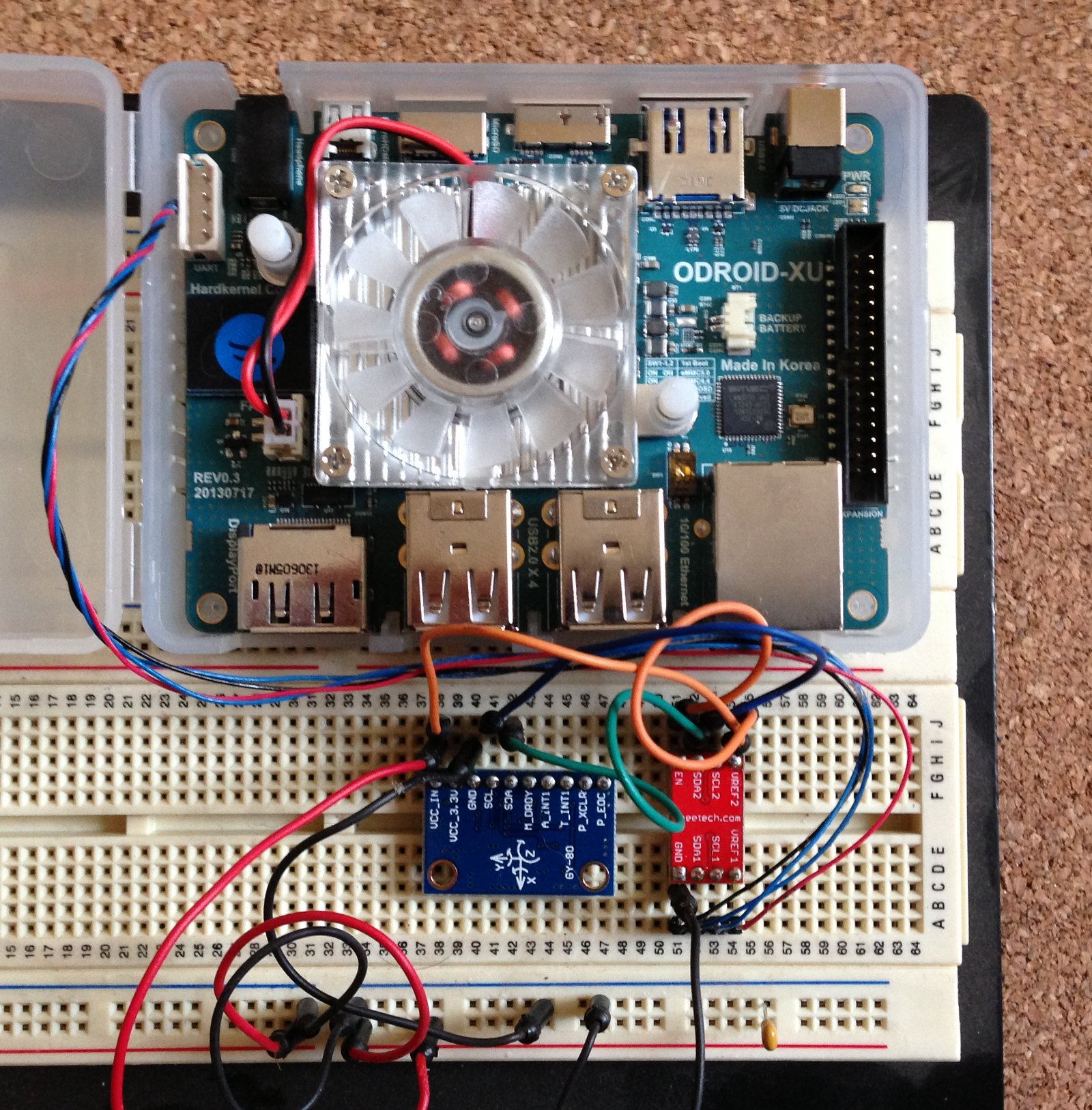
El siguiente es el diagrama de interconexión probado:
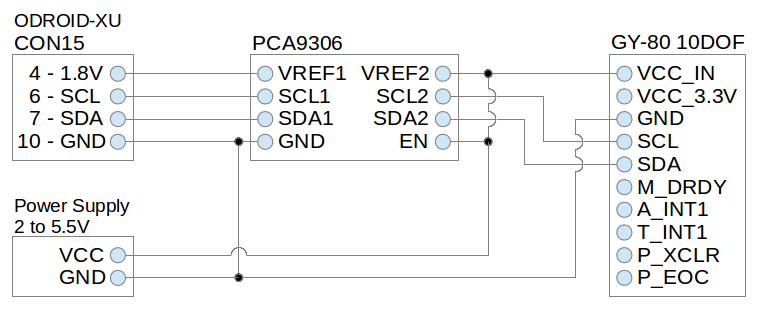
Este 10DOF puede energizarse desde 2V hasta 5.5V (VDD). Sus sensores están alimentados internamente a 3.3V, pero según esta documentación su interfáz I2C está ajustada a VDD, por lo que el PCA9306 tiene que traducir entre los 1.8V del ODROID-XU y VDD (y no 3.3V).
Este 10DOF tiene 4 dispositivos I2C con las siguientes direcciones:
- 0x1E: compás de 3 ejes (chip HMC5883L)
- 0x69: giroscopio de 3 ejes (chip L3G4200D)
- 0x53: acelerómetro de 3 ejes (chip ADXL345)
- 0x77: sensores de presión y temperatura (chip BMP085)
Con este pequeño programa, se puede consultar el chip del acelerómetro para detectarlo y verificar el setup. Actualmente estoy probando Ubuntu Server 14.04 de paquete en el ODROID-XU, el que incluye el compilador GCC por defecto.
Ahora que tengo la comunicación I2C funcionando, seguí la documentación de los chips y ejemplos en Internet para escribir un borrador de clases C++ para leer los sensores del 10DOF. Están disponibles en esta Sección de Código en el repositorio SourceForge para clonar el Robot DARwIn-OP.
Probé en forma exitosa el 10DOF energizándolo (junto al PCA9306) con 3.3V y 5V, pero a 3.3V consumen 0.024A (o 0.079W) y a 5V consumen 0.085A (o 0.425W). Así que en mi diseño final para el DARwIn-OP probablemente incluya un regulador de 3.3W para disminuir el consumo.