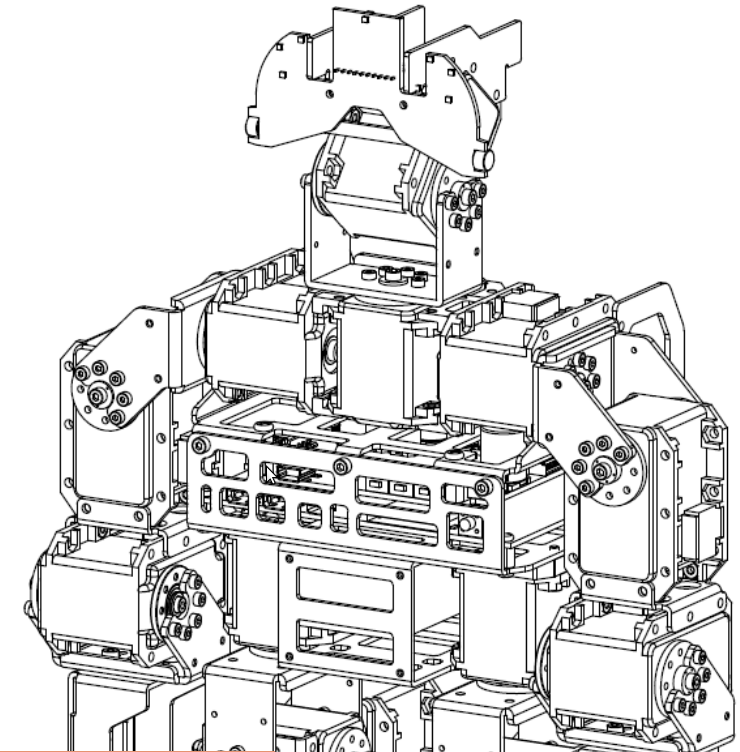
Con la primera prueba de concepto hecha, voy a continuar con las piezas del DARwIn-OP de abajo para arriba empezando con una pierna.
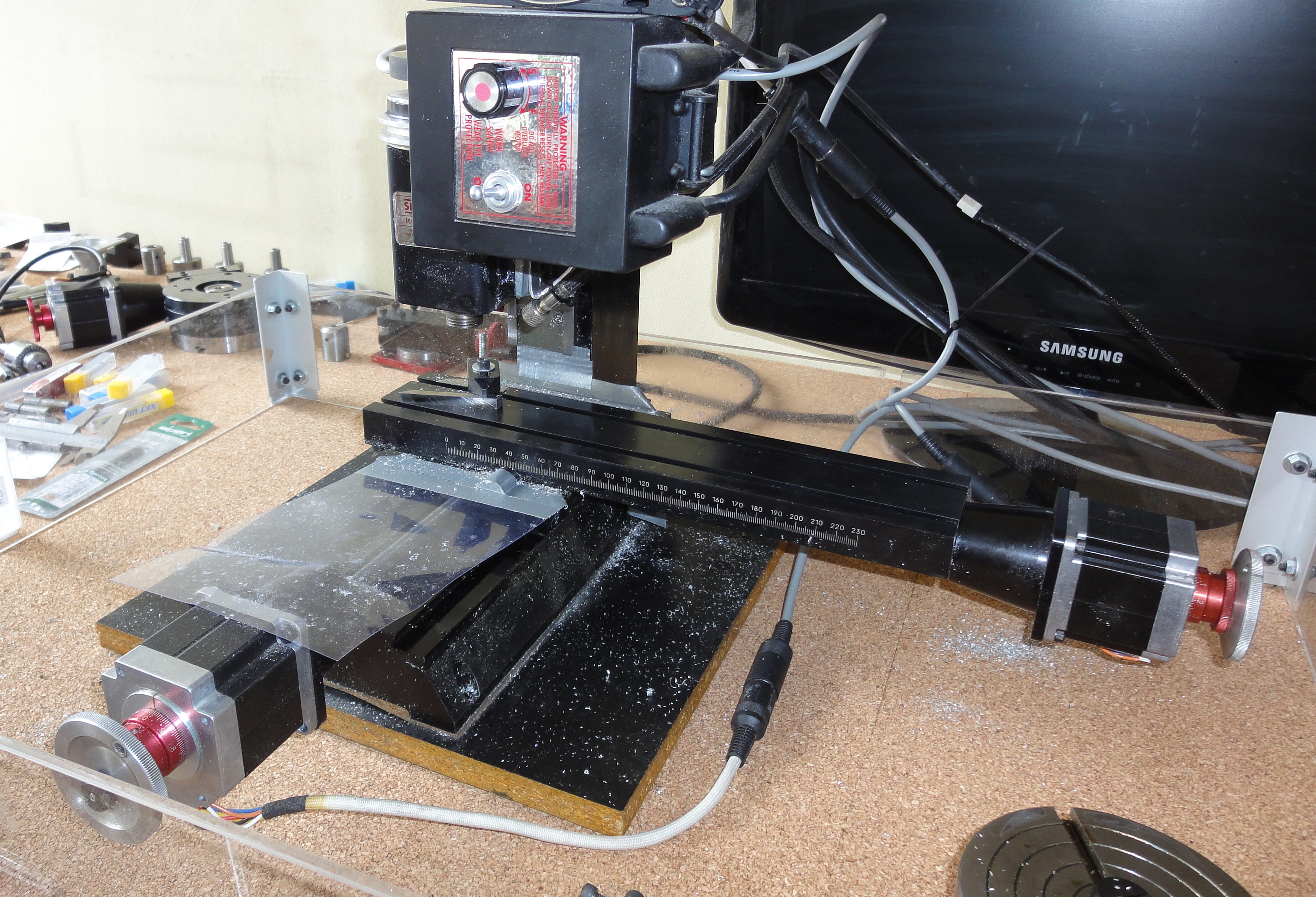
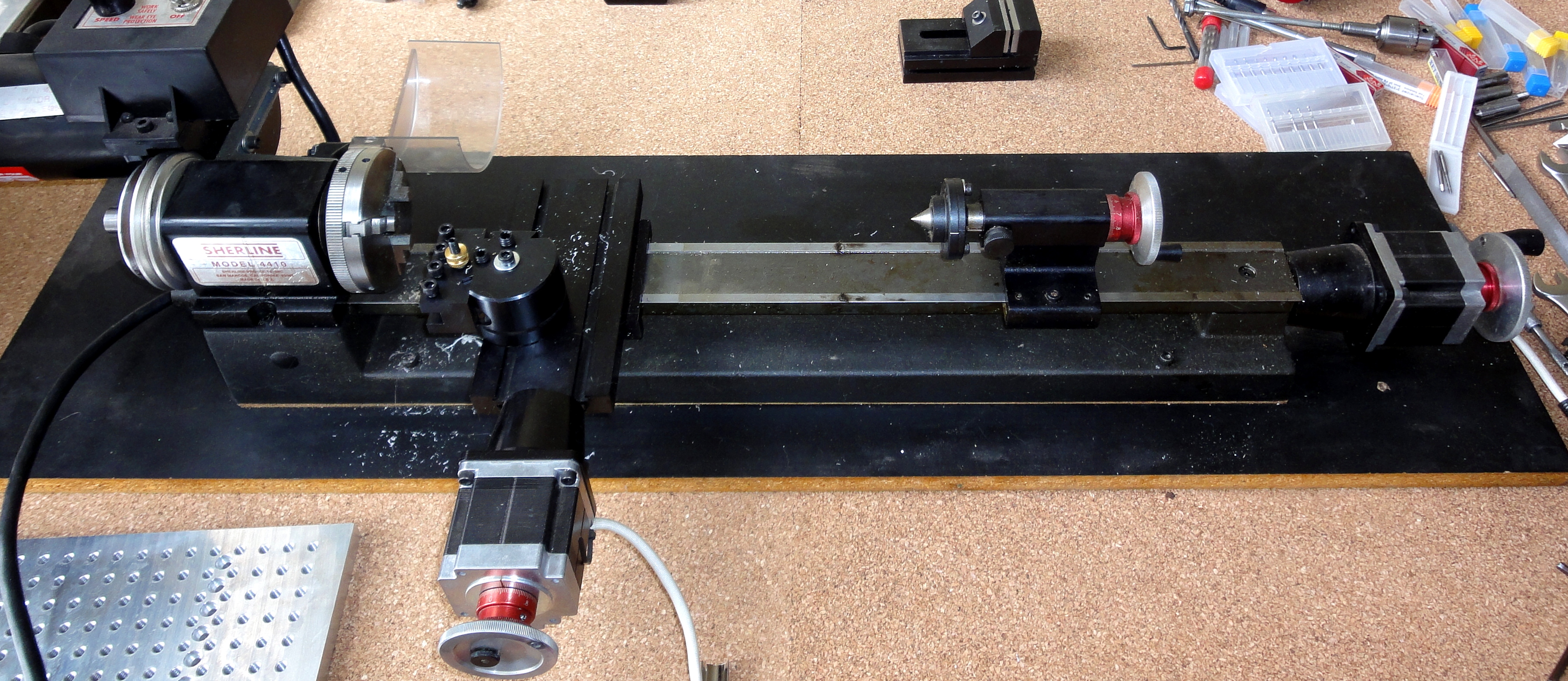
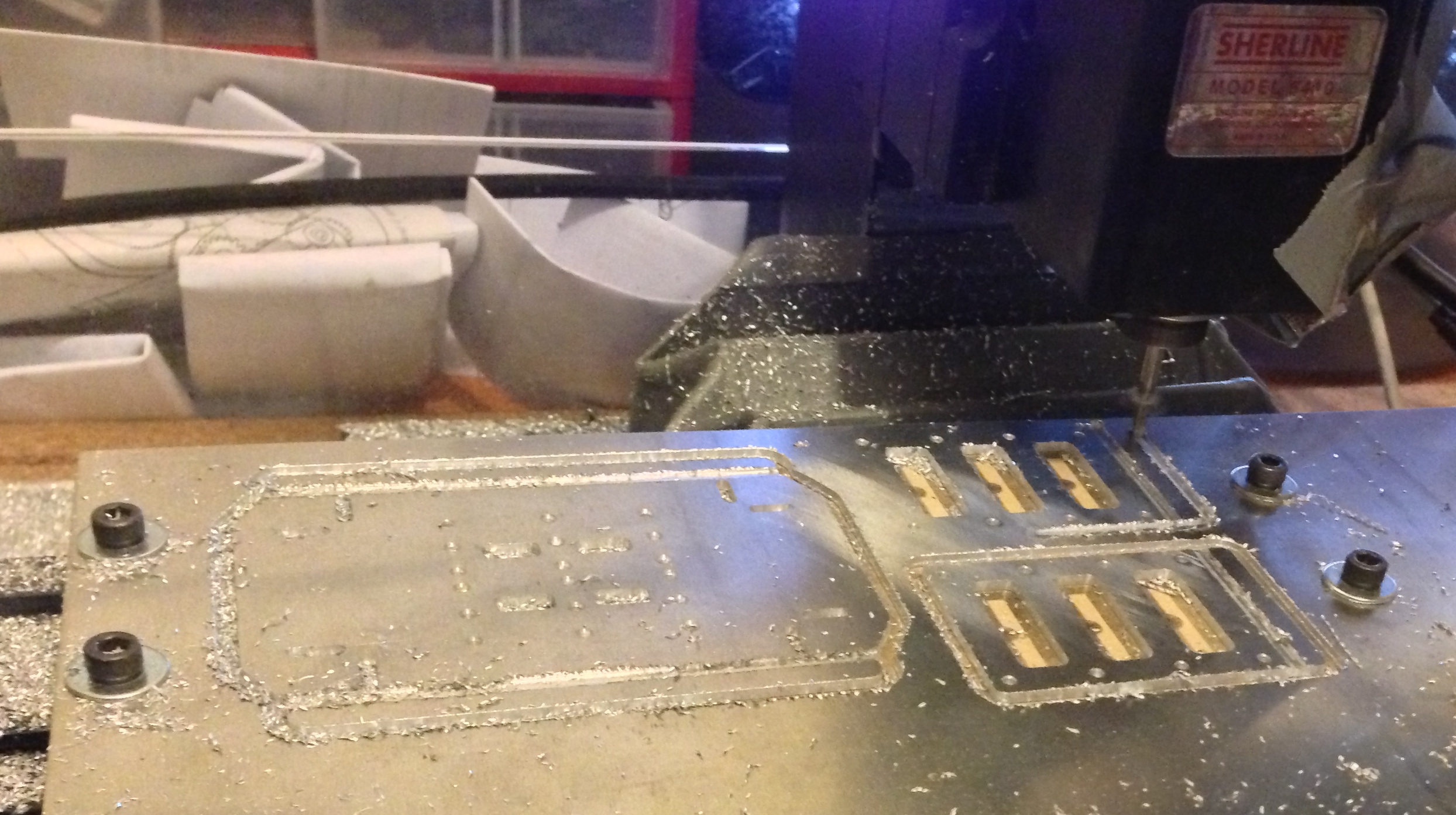
Como mi fresadora Sherline puede manejar una superficie de 200x100mm, corté las planchas de aluminio en pedazos más pequeños, después de los primeros cortes, reduje el tamaño a 150x100mm y 200×100 según las piezas a cortar.
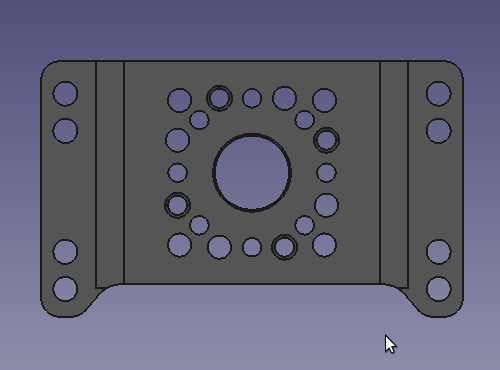
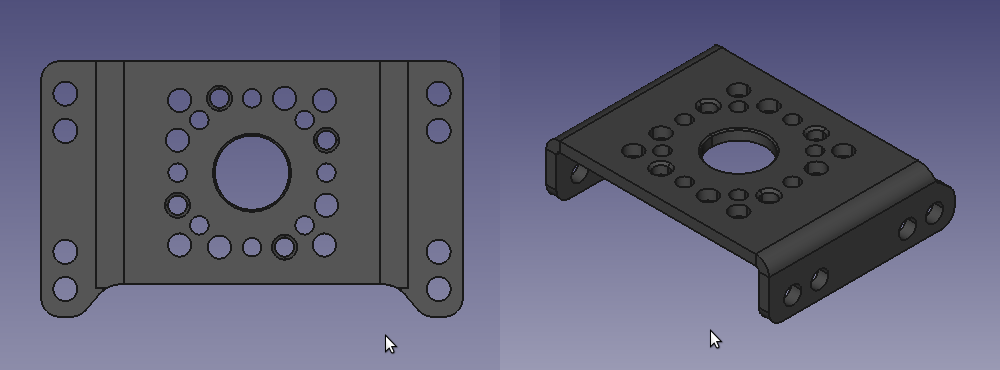
El pie es la pieza FR07_E160, el Manual de Fabricación la lista como de 1,5mm de grosor en la página 8. Pero los archivos de los modelos 2D y 3D son consistentes con una pieza de 2mm. Creo que el manual es el equivocado.
- Pie y Rodillas
El primer pie fue cortado sobre una placa de madera de 9mm, después pasé a usar una placa de aluminio de 1/4″ como base, por la rigidez. Después entraré más en detalle en esto. Las herramientas usadas son:
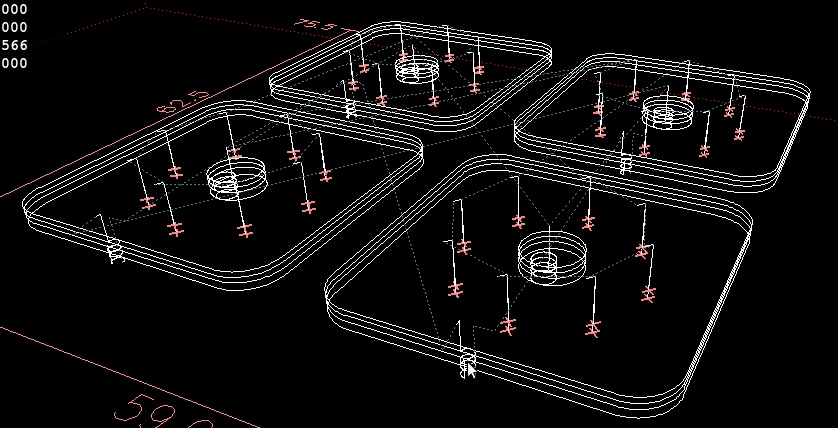
- Broca-centro #1
- broca de 2mm (en ese momento no tenía las brocas de 2,05mm, son agujeros para hilos de 2,5mm).
- fresa de 2,5mm para los sacados (el sacado más delgado es de 2,6mm según el modelo
- fresa de 3mm para cortar la pieza. Más tarde dejé de usar esta fresa ya que requiere un cambio extra de herramienta (Mi fresadora no tiene cambio automático de herramientas).
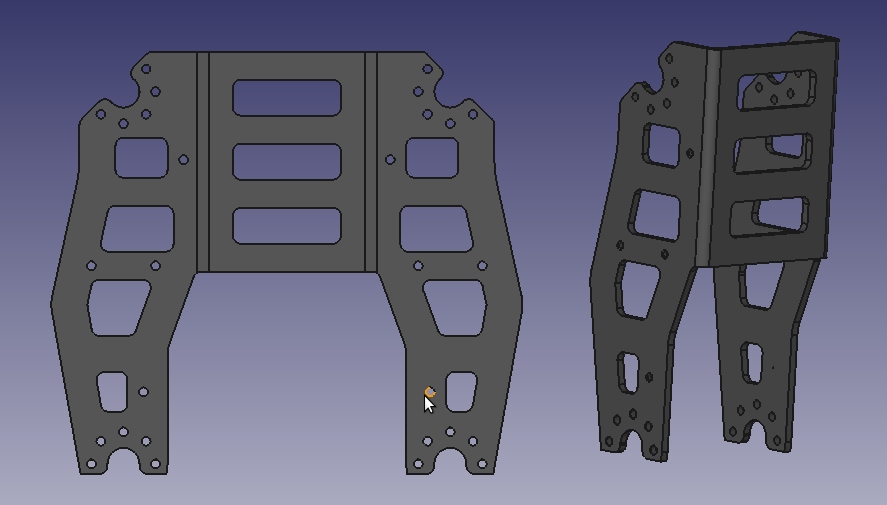
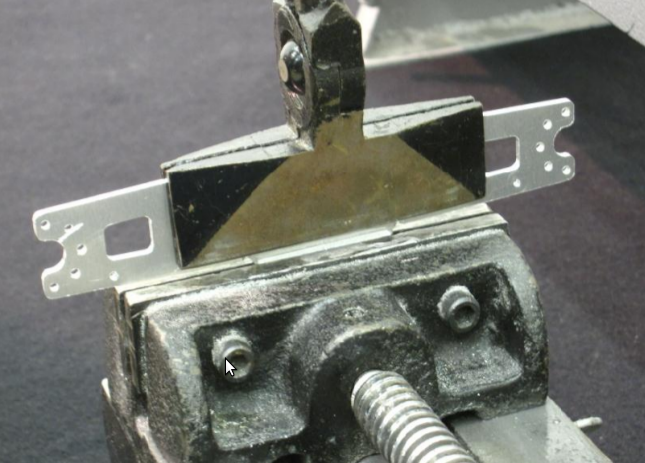
Con el pie corté un par de ‘rodillas’. El DARwIn-OP puede parecer un robot pequeño en fotografías dado que es de aprox 45cm de alto. Pero algunas de las piezas no son pequeñas, la parte bajade la pierna (FR07_H133) es aproximadamente de 118x106mm antes de doblar. Considerando además el ancho de la fresa, la fresadora se queda corta en 10mm en su eje más pequeño (Y).