El robot DARwIn-OP tiene varios documentos mecánicos publicados en esta carpeta de sourceforge. Los documentos están bien hechos y bastante completos, fueron escritos por RoMeLa de Virginia Tech.
DARwIn OP Fabrication Manual.pdf
- Describe cómo fabricar las piezas necesarias para clonar el DARwIn-OP. Literalmente el robot es un montón de servos unidos por piezas de aluminio.
- Recomienda usar aluminio 5025 para fabricar las piezas. Acá en Chile no es fácil de encontrar, así que compré un poco en Ebay. Ahora sé que éste es aluminio naval y que es usado para embarcaciones, así que hay más dónde preguntar. No recomiendo usar aluminio 1100 (el típico en plancha) porque se pega a las brocas y fresas mucho.
- Lista los archivos de diseño para cada pieza.
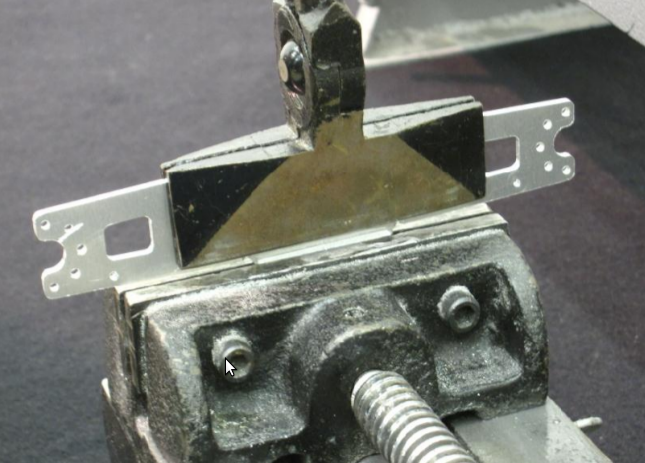
- Lista las herramientas a usar y explica el proceso de fabricación, el cual requiere una fresadora automatizada (CNC). Las piezas se hacen principalmente de planchas de aluminio de 2mm y 1,5mm y se explican varias técnicas de doblado par darles la forma 3D (dependiendo de las herramientas que se tengan a mano). Algunas piezas requieren planchas de 5mm (o 1/4″). También se necesitan hacer hilos de 2mm y 2,5mm.
- También lista un estimado de costos (USD) de materiales y herramientas.
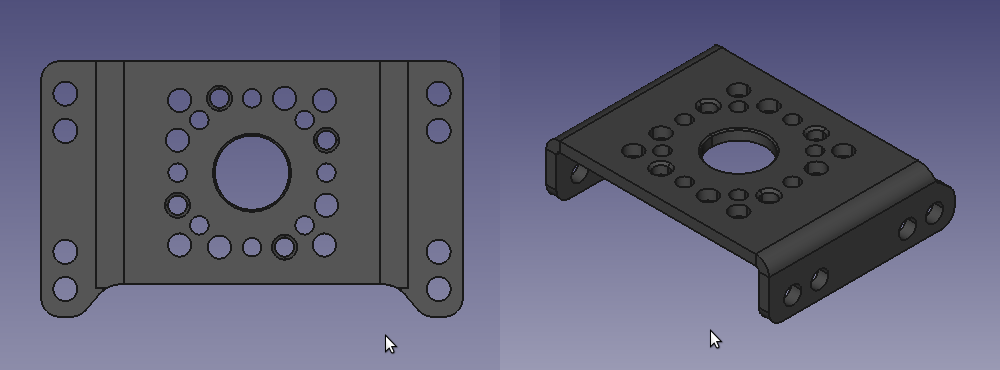
- Este ZIP contiene los diseños 2D y 3D de las piezas, todas disponibles en 3 formatos diferentes(STEP, PRT, IGS). Los diseños 2D son en realidad diseños 3D de las piezas sin doblar y los diseños 3D son de la forma final de las piezas después del doblado. Yo uso FreeCAD para Ubuntu (disponible por apt-get) para visualizar y medir archivos STEP.
- Contiene los modelos 3D en formato STEP de las coberturas plásticas del robot.
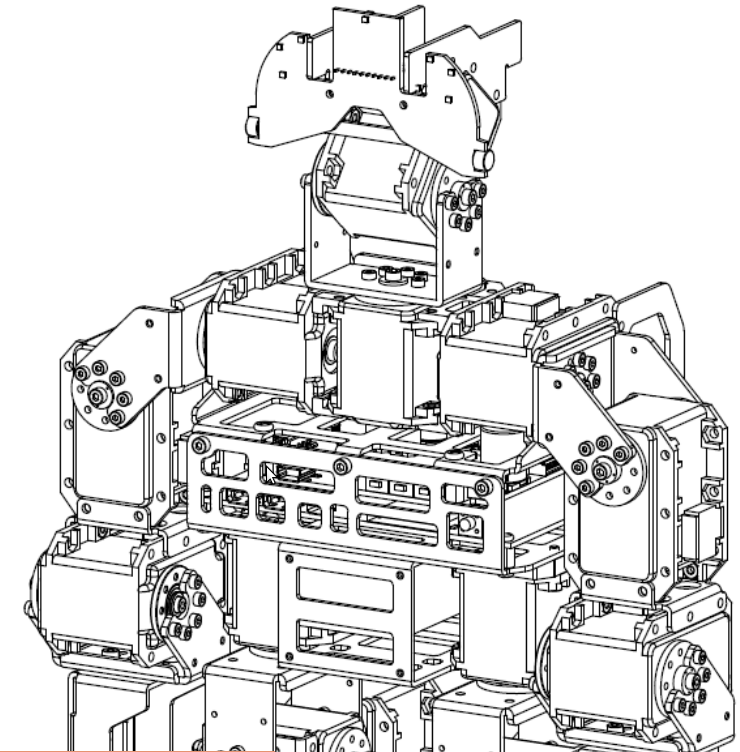
- Describe el proceso de ensamblado de los servos con las piezas y la placa madre. El ensamblado es hecho en partes (piernas, pecho, brazos) las que después se juntan. Hay que tener cuidado de ensamblar correctamente los servos, éstos tienen un disco motriz y a veces por el otro lado, un disco volante (con un rodamiento). Es necesario instalar los servos en la posición indicada, además el disco motriz tiene marcas que deben alinearse ya que el servo MX-28T tiene codificación absoluta de su posición (el software de control espera cierto valor para la posición de pie por ejemplo).
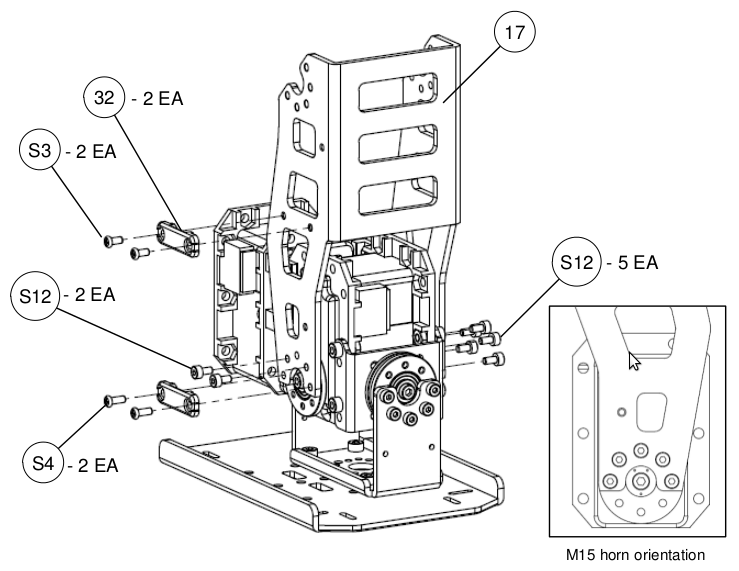
- También lista los componentes necesarios incluyendo tuercas, pernos y tornillos.
- Este ZIP contiene un grupo de archivos con las especificaciones dinámicas (masa, centro de masa, inercia) de cada sección. Estas no son necesarias para la fabricación del clon de DARwIn-OP, pero es bueno mencionarlas ya que son útiles para simulación y control. Fabricar el clon con los procesos y materiales originales ayuda a mantener al robot cerca des estas especificaciones dinámicas de forma que cuando camine no tropiece por un brazo o pierna muy liviano o pesado.
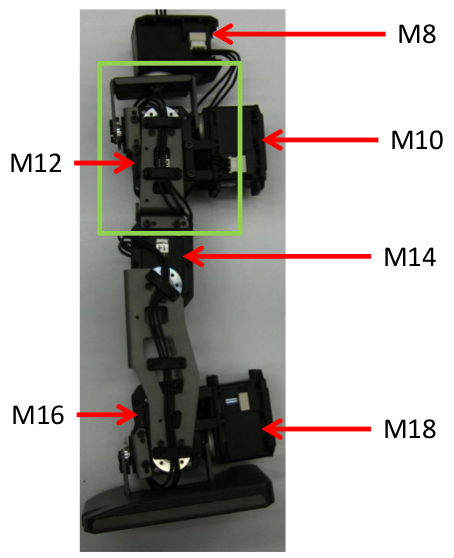
- Enumera los servos MX-28T usados y muestra cómo interconectarlos. Estos servos se conectan en cadena con un bus de poder y datos TTL de 3 hilos. Antes de que un servo pueda ser encadenado con otro, se le tiene que programar un ID único según enumera el manual, ya que vienen todos con ID = 1 de fábrica. No me gusta mucho la forma que se muestra para sujetar los cables con unos sujetadores de plástico, voy a buscar otra forma, pero probablemente tenga que usar la indicada ya que sujeta bien firme los cables y los flecta adecuadamente en los ejes de las articulaciones.
La documentación es bastante completa y hay más documentos en sourceforge, sólo mencioné los más importantes.
Faltan algunos diseños, principalmente de piezas circulares que requieren de un torno:
- Disco motriz (HN07-N101). Estos los voy a comprar ya que tienen el eje estriado, lo que requiere de más herramientas especializadas. Al comprar un servo, éste viene con esta pieza, pero en el pack de 6 servos no vienen y deben ser compradas a parte.
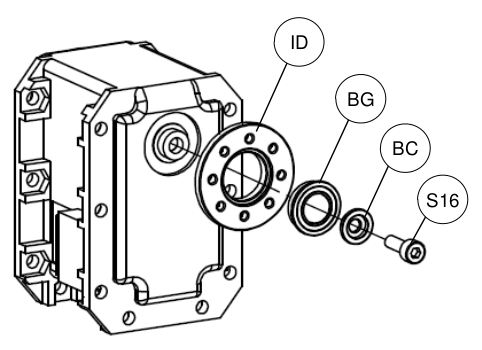
- Disco volante (HN07-i101).
- Pieza (FR07-F101).
- Tapa de rodamiento (RX28 CAP BEARING).
- Sujetador de cable (parece ser de plástico).
Para algunos de éstos, excepto el sujetador de cable, encontré los archivos de diseño en esa página de soporte de Robotis. También ahí están los diseños de varias otras piezas.
Después de pensarlo por un tiempo, decidí también hacer el disco volante, las piezas FR07-F101 y la tapa de rodamiento. Están a la venta en tiendas de róbotica (compré un par para probar). El rodamiento que va en el disco volante es modelo MF106ZZ (6x10x3mm) y se encuentra en Ebay por 1 USD.